
ABSTRACT
This article considers a novel approach to using global positioning system (GPS) signal strength readings and estimated velocity vector for estimating the attitude of a small fixed-wing unmanned aerial vehicle (UAV). This approach has the benefit being able to estimate full position, velocity and attitude states of a UAV using only the data from a single GPS receiver and antenna. Two different approaches for utilizing GPS signal strength within measurement updates for UAV attitude in a nonlinear Kalman filter are discussed and assessed using recorded UAV flight data. Comparisons of UAV pitch and roll estimates against measurements from a high-grade mechanical gyroscope are used to show that approximately 5° error with respect to both mean and standard-deviation on both axes is achievable.
METHODOLOGY
The key to observing attitude from GPS signal strength is that the receiver’s antenna gain profile is not perfectly uniform. Because of this, the signal strength drops as the angle of the satellites location goes away from the bore-sight. In this paper, we refer to this angle as the satellite’s elevation with respect to the antenna bore-sight, and we denote it with α. This α-angle is similar to the traditional satellite elevation angle, however, it takes into account the rotation due to changes in attitude.
EXPERIMENTAL SET-UP

Figure 1. West Virginia University’s Red Phastball research unmanned aerial vehicle (UAV)
The experimental UAV used for this study is West Virginia University’s (WVU’s) Red Phastball Platform as shown in Figure 1, The Red Phastball is primarily used for sensor fusion research and its avionics package was updated for this study to include a Novatel OEM-615® dual-frequency GPS/Globalnaya Navigazionnaya Sputnikovaya Sistema (GLONASS) receiver, in which GPS pseudorange, carrier-phase and signal strength measurements were recorded at a rate of 10 Hz.
RESULTS
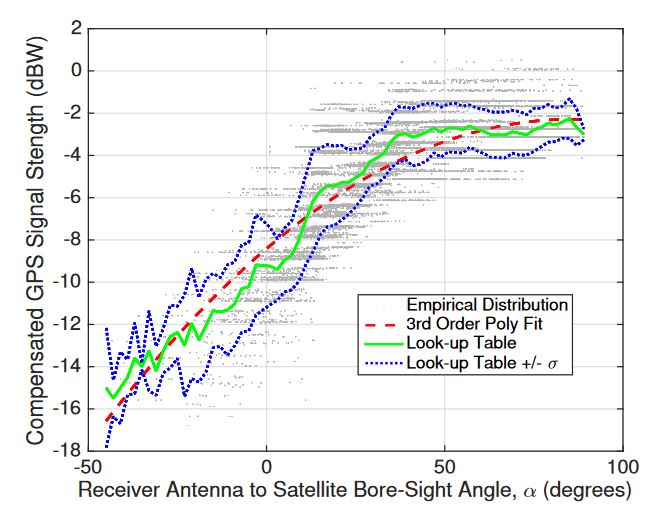
Figure 2. Empirical curve and calibration curves determined for mapping global positioning system
As shown in Figure 2, as one would intuitively expect, the closer α is to the zenith direction (i.e., α of 90◦), the higher the received signal strength reading. Furthermore, Figure 2 illustrates that the polynomial fit approximates the distribution reasonably well, and that the standard deviations of the look-up table suggest similar levels of uncertainty across all values of α.
CONCLUSIONS
This paper considered UAV attitude estimation based upon GPS signal strength measurements that are compensated for known losses. This has the benefit of GPS alone being used for a full position, velocity, attitude (PVA) state estimator. Alternatively, it could be incorporated into a navigation system to improve robustness, offer fault-tolerance, serve as a back-up solution, or assist in the detection of malicious GPS signal spoofing. The approach leverages the fact that abrupt changes in attitude will lead to loss or gain of signal strength depending on the relative orientation of a satellite’s location and the antenna bore-sight angle, but does not consider the impact of GPS signal strength changes that could be induced due to the local environment such as buildings, foliage, etc. Two calibration approaches were considered along with elevation dependent measurement weighting.
The experimental UAV flight data analysis demonstrates that attitude estimates with a coarseness of around 5° are achievable using only GPS signal strength measurements. While the level of attitude estimation accuracy when using GPS information alone was determined to be coarse in comparison to other state of the art methods, this work assessed its standalone performance using fixed-wing UAV flight data with the motivation that this technique has the potential to be an important building block for incorporation within an GPS anti-spoofing defense or a fault-tolerant multi-sensor fusion navigation system. Future work will asses if the availability of additional signal strength observations from multi-constellation Global Navigation Satellite System (GNSS) can further reduce the roll estimation error.
Source: West Virginia University
Authors: Jason Gross | Yu Gu | Matthew Rhudy