
ABSTRACT
A key point in human movement analysis is measuring the trajectory of a person’s center of mass (CoM). For outdoor applications, differential Global Navigation Satellite Systems (GNSS) can be used for tracking persons since they allow measuring the trajectory and speed of the GNSS antenna with centimeter accuracy. However, the antenna cannot be placed exactly at the person’s CoM, but rather on the head or upper back. Thus, a model is needed to relate the measured antenna trajectory to the CoM trajectory. In this paper we propose to estimate the person’s posture based on measurements obtained from inertial sensors.
From this estimated posture the CoM is computed relative to the antenna position and finally fused with the GNSS trajectory information to obtain the absolute CoM trajectory. In a biomechanical field experiment, the method has been applied to alpine ski racing and validated against a camera-based stereo photogrammetric system. CoM position accuracy and precision was found to be 0.08 m and 0.04 m, respectively. CoM speed accuracy and precision was 0.04 m/s and 0.14 m/s, respectively. The observed accuracy and precision might be sufficient for measuring performance- or equipment-related trajectory differences in alpine ski racing. Moreover, the CoM estimation was not based on a movement-specific model and could be used for other skiing disciplines or sports as well.
MATERIALS AND METHODS
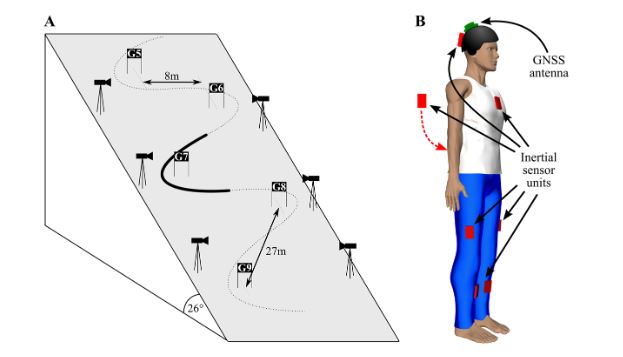
Figure 1. Materials and setup. (A) Illustration of the giant slalom slope. The left turn marked with the solid line was covered by the six cameras and analyzed in this study
The measurements took place on a giant slalom slope of 26◦ inclination. Eleven gates were positioned at a constant distance of 27 m with an 8-m offset (Figure 1A). The left turn around gate 7 was covered with the video-based reference system. Six European Cup level alpine ski athletes participated in the study. Each athlete skied the course two times. Informed written consent was obtained from each athlete. The protocol was approved by the University Ethics Committee of the Department of Sport Science and Kinesiology at the University of Salzburg.
RESULTS
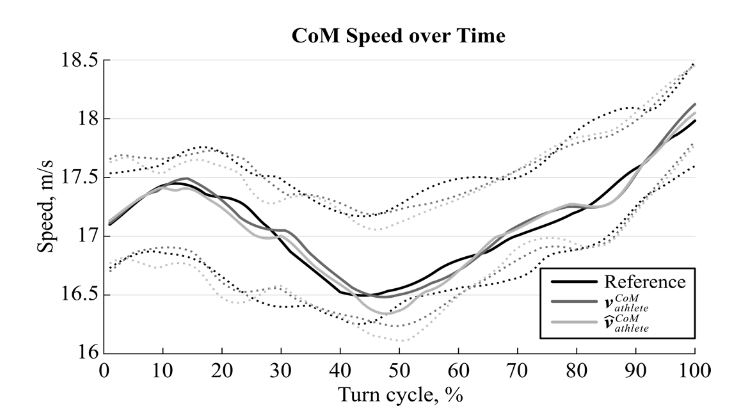
Figure 4. Reference speed (black) and estimated speed (dark and light grey) for the CoM
The GNSS antenna position error was on average (accuracy) 0.04 m with a standard deviation (precision) of 0.03 m (Table 1). The position difference between GNSS antenna and reference CoM was on average 0.62 m with a standard deviation of 0.05 m. The CoM model including the data obtained by inertial sensors allowed estimating this distance and correcting for it.
DISCUSSION
In the current study, dGNSS and inertial sensors have been combined for obtaining an estimate of the center of mass kinematics for alpine ski racing. In a first step, inertial sensors were used to compute a full 3D body model of the skier. In the second step, this model was fused with the position and speed data obtained from dGNSS and the skier’s CoM kinematics were calculated. For an easy application in daily training, a simplified model using only two inertial sensors—fixed to the head and sternum—was proposed.
CONCLUSIONS
This study provided the fundamental concepts for an accurate and precise estimation of a skier’s CoM trajectory and speed based on the fusion of dGNSS and inertial sensors. Inertial sensor information was used to construct a body model to estimate relative CoM kinematics and was added to the absolute antenna kinematics obtained from a dGNSS. The proposed system was simpler to use than existing systems based on cameras or terrain models.
Aiming an even simpler system, the reduction of sensors from a full 3D body model to a simplified trunk model lead to almost no decrease in accuracy and precision. The model’s independency should allow to apply the algorithm without adaptations to the different skiing disciplines such as slalom or downhill. Future developments should aim at improving the accuracy and precision through better sensor fusion and at further simplifying the system.
Source: University of Salzburg
Authors: Benedikt Fasel | Jorg Sporri | Matthias Gilgien | Geo Boffi | Julien Chardonnens | Erich Muller | Kamiar Aminian