
The problem with motorized wheelchairs is that they are large, clumsy and difficult to control. This is especially true if the driver has severely reduced capabilities. What we want is a wheelchair that can take instructions from the driver and then based on its understanding of the environment, construct a plan that will take the user to the intended destination.
The user should be able to sit in a room, tell the wheelchair that he wants to be in another room and the wheelchair should take him there as quickly and smoothly as possible.
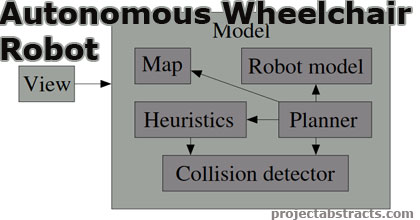
The planner presented in this thesis uses a randomized bi-directional tree search. It builds two trees, one from the start state and one from the goal state by randomly sampling the control space of the robot. Each node is a state and each edge is a control input to the robot.
Navigation for Autonomous Wheelchair Robot
In order to decrease the execution time and improve path quality, the planner uses several heuristics to guide the planner. The heuristics are based on Rapidly-exploring Random Trees, Probabilistic Road-maps and the gradient method.
For a normal household situation, this planner can construct a decent plan in mere seconds on relatively slow hardware. Most times it finishes in a fraction of a second. This means that the planner has the ability to run in real-time. As a consequence, the planner can handle a dynamic environment, inaccurate sensor readings and an inaccurate physical robot model.
Source: Linköping University
Author: Edlund, Andreas