
ABSTRACT
This paper describes the design, construction and validation of a mobile sensory platform for greenhouse monitoring. The complete system consists of a sensory system on board a small quadrotor (i.e., a four rotor mini-UAV). The goals of this system include taking measures of temperature, humidity, luminosity and CO2 concentration and plotting maps of these variables.
These features could potentially allow for climate control, crop monitoring or failure detection (e.g., a break in a plastic cover). The sensors have been selected by considering the climate and plant growth models and the requirements for their integration onboard the quadrotor. The sensors layout and placement have been determined through a study of quadrotor aerodynamics and the influence of the airflows from its rotors.
All components of the system have been developed, integrated and tested through a set of field experiments in a real greenhouse. The primary contributions of this paper are the validation of the quadrotor as a platform for measuring environmental variables and the determination of the optimal location of sensors on a quadrotor.
SYSTEM OVERVIEW
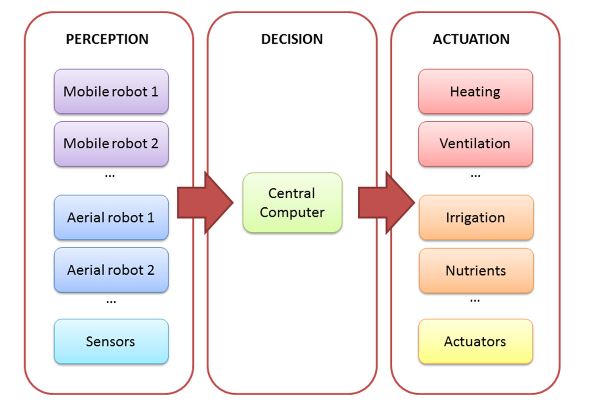
Figure 1. Architecture of the complete system
The proposal of a mini-UAV-based sensory system is expected to be integrated in a greenhouse farming management system (Figure 1). The first one performs the acquisition of the environmental variables that can be measured in the air, while the second one encompasses not only the sensing (i.e., acquisition of all environmental variables) but also the actuation (i.e., climate control, crop monitoring and failure detection).
LOCATION OF SENSORS
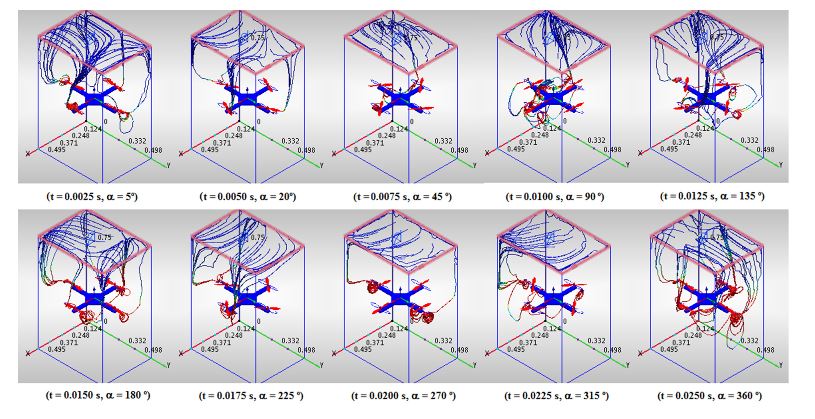
Figure 3. Airflows over the quadrotor
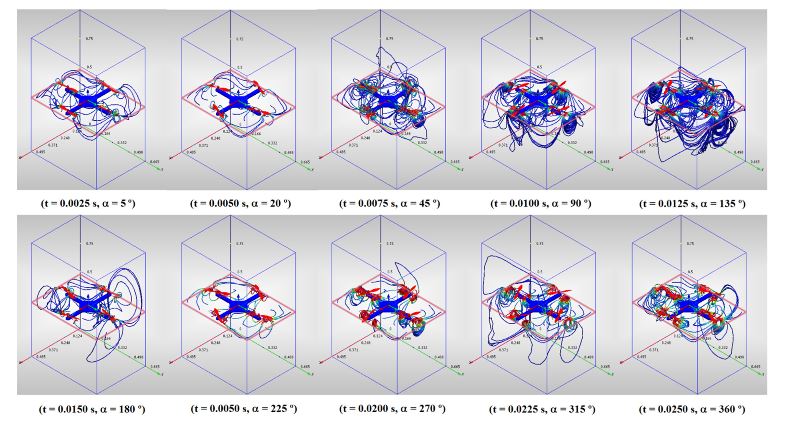
Figure 4. Airflows under the quadrotor
The CFD simulation results are shown in Figures 3–5. The traces of fluid particles and the velocity profiles in planes have been chosen for a better visualization of the results to show them in a clear and precise manner from both a qualitative and quantitative perspective. Each frame is associated with its simulation time (t) and its propeller angle (α). The evolution of the airflows across the quadrotor can be seen in Figure 3.
EXPERIMENTS, RESULTS AND DISCUSSION
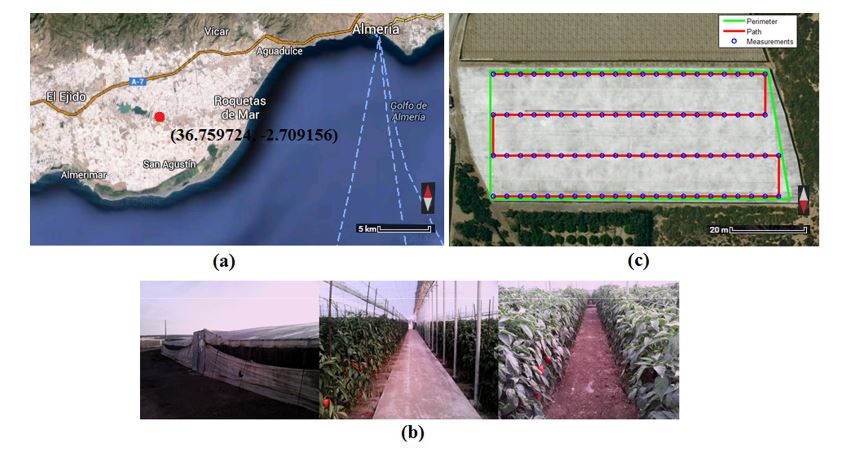
Figure 10. (a) The “sea of plastics” in Almeria (Andalucia, Spain)
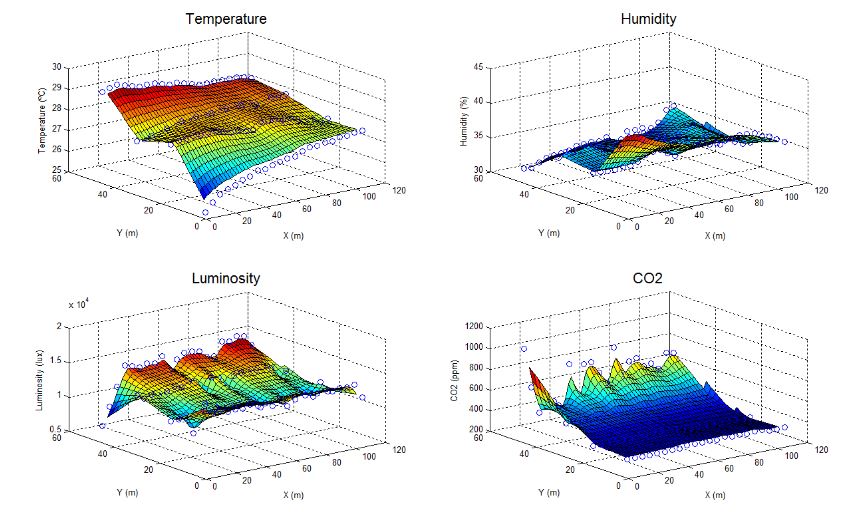
Figure 11. Maps of temperature, humidity, luminosity and CO2 concentration of the greenhouse
Different perspectives of the greenhouse (e.g., outside, inside, front and top) are shown in Figure 10. The covered surface, the measurement points and the path followed in the experiments are detailed in the top view (Figure 10c). The maps of temperature, humidity, luminosity and carbon dioxide concentration obtained in the greenhouse are shown in Figure 11. The points show the measurements of the sensors, and the surfaces show interpolations between these points.
CONCLUSIONS
This paper proposes a quadrotor-based sensory system for measuring environmental variables of a greenhouse. In contrast to Wire less Sensor Networks (WSNs), Unmanned Ground Vehicles (UGVs) and other solutions, Unmanned Aerial Vehicles (UAVs) are able to obtain measurements at nearly any point in the three dimensional space of the greenhouse, which facilitates activities such as local climate control and crop monitoring.
The primary contributions of this paper are the determination of the optimal location of sensors on the quadrotor and the validation of a quadrotor as a platform for measuring environmental variables. First, an exhaustive study of quadrotor aerodynamics was performed in order to determine the optimal allocation for sensors in the quadrotor. This study was supported by Computational Fluid Dynamics (CFD) simulations and experiments and has concluded that the optimal location for the sensors is the central part of the top side of the quadrotor.
The results of this study can be applied to different contexts, including the design of a high-efficiency quadrotor and the location of other sensors and actuators. Second, a set of field experiments was performed in a greenhouse to validate the mini-UAV sensory system. These experiments have shown that the system can collect the environmental variables of the greenhouse, including the gas concentrations together with their spatial and temporal variability and possible disturbances.
Differences in the sensor measurements that can be attributed to the rotors’ influence were bounded; relative errors were lower than 4%. The system allows for climate control, crop monitoring and failure detection in a greenhouse and can be implemented in other industries and infrastructures. Finally, the system can incorporate other sensors for measuring other gases such as CO, CH4, SO2 or NO2, if required.
Source: University of Madrid
Authors: Juan Jesus Roldan | Guillaume Joossen | David Sanz | Jaime del Cerro | Antonio Barrientos