
ABSTRACT
The paper describes the design and verification of a river otter tracking system. The system consists of an implant and a base station. The implant periodically stores its latitude, longitude, and time of acquisition of aforementioned position coordinates. The implant will transfer the data to the base station when within range.
The base station will serve as the location that the researcher can access the data and easily transfer the data to their computer. The latitude, longitude and acquisition time will be determined using a standard Global Positioning System while the wireless data transfer is over a generic sub – 1 gigahertz Radio Frequency system. The original proposal included a piezo electric power generation scheme that is proven to b e impossible with the technology used.
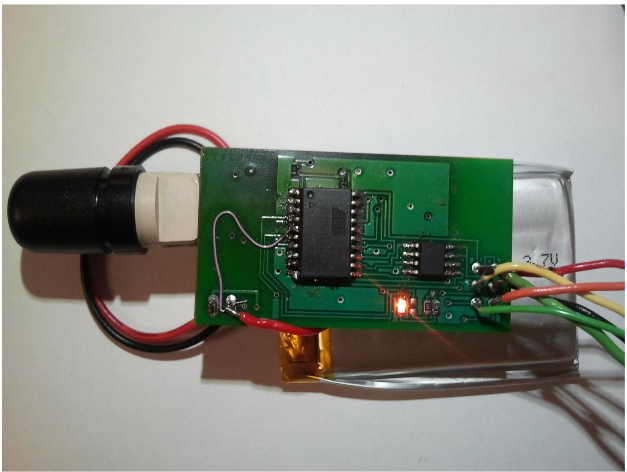
Figure 20: Final Implant Board
DESIGN

Figure 1: Block diagram of complete system.
GPS System
This system acquires the GPS location data from the satellites. This data includes the time stamp, Longitude, and Latitude. The altitude is acquired if possible, but not necessarily. It receives power from the rechargeable battery.
Implant μC
This is the processing center of the implants. It controls power consumption and data storage. It receives the data from the GPS system and stores it. It receives battery level information from the Rechargeable Battery using and uses this information, along with its internal clock, to control the RF chip and GPS system.
RF Chip & Antenna
This relays the stored data from the μC to the base station. It receives its power from the battery in the Rechargeable Battery.
Rechargeable Battery
This provides power to the complete implant system including the GPS system, Implant Microcontroller and the RF chip.
Large Battery
This battery will supply power to the other components of the base station. It will be rechargeable and easily changeable.
RF Chip
This receives the relayed data from the implant and sends it to the μC on the base station. It receives its power from the battery in the large battery.
Base Station μC
This is the processing center of the base station. It controls power consumption and data storage. It receives the data from the RF chip and stores it. It receives power from the large battery.
SD Connector
This is used to transfer the stored data to the SD card when data is being retrieved by the researcher. It gets its power from the large battery, and its data from the μC.
DESIGN VERIFICATION
The RF communication between the base station and the implant did not work. We were not able to implement a full system test as described below, so the main RF test (Appendix A Test III.1) communication between the base station and the implant could not be performed. Partial functionality tests were performed as well to determine the how close the RF system was to working.
The RF power pins (1,5,19,21 CC1000) were getting 3.33 volts when the power was connected and the RF chip GND pins (2, 6, 7, 8, 14, 15, 16, 19, 22) were getting 0 V relative to system GND. This satisfied RF Test III.1A. The RF transmission Test III.1B involved looking at the RF out (pin 4 CC1000) to see if any data was being modulated to the correct RF frequency. We used a vector signal analyzer to measure the output and the result is included below.

Figure 7: Output of the RF chip in transmit mode.

Figure 8: Microcontroller test screen shot; MATLAB output.
Referring to verification Test II.2 from Appendix A. We were able to communicate with using an external USB to serial port convertor (SILABS – CP2101) and Matlab we were able to verify the communication at 4800 BAUD. Here is a screenshot of the data displayed in Matlab after receiving the GPS time data from the microcontroller using UART at 4800 BAUD.
COST

Table 7: cost of parts and quantities.

Table 8: cost of labor.
CONCLUSION
The main goal of the project was to create a device to track the location of an animal using the GPS system and wirelessly transfer the data to a base station. The device should be implantable into an otter and also have a reasonable live span while accurately track otter movement patterns. Given the complexity of the assignment the accomplishments achieved during the semester were impressive. Ultimately a small device that records its current location.
This device included a GPS antenna, GPS chip, microcontroller, memory chip, and switch. All of these components were chosen for their low power consumption and small size footprint as well as being integrated together on a 1 by 2 inch 4-layer PCB. The same PCB also included an RF chip, matching circuit and antenna, although this portion did not work as described in the RF system test and uncertainties section. The system is able to accurately store GPS coordinates and store them in nonvolatile memory.
The RF system was supposed to communicate with the base station which also has the capability to easily offload the data for the researchers. The only fully functioning portion of the base station is the microcontroller itself. The RF system on the base station is in the same state as that which is on the implant. The SD card hardware is completely set up as well as the file system interface design.
Given there were so many components of the project and the low power and size requirements the amount of goals achieved was admirable. All the hardware for the device is in place. We still need to write the rest of the code as well as additional debugging to ensure their functionality. The main data acquisition portion of the device is fully functioning including the software portion. Even though many of the design requirements necessary to have the device implanted into the otter were not fully met, in the scope of a senior design class the project should be considered a success. Every one of the group members learned numerous things about the design process and the work that goes into a fully functioning electronic device.
Source: University of Illinois
Authors: Bilal Gabula | Gerard McCann | Osayanmo Osarenkhoe
>> Antenna Design using Matlab for ECE Final Year Students
>> Antenna Digital Signal Processing Projects for Final Year Students
>> 50+ Matlab projects for Digital Image Processing for Final Year Students
>> 200+ Matlab Projects based on Control System for Final Year Students
>> 80+ Matlab Projects based on Power Electronics for Engineering Students