
ABSTRACT
Agribot is a robot designed for agricultural purposes. As one of the trends of development on automation and intelligence of agricultural machinery in the 21st century, all kinds of agricultural robots have been researched and developed to implement a number of agricultural production in many countries. This Bot can performs basic elementary functions like picking, harvesting, weeding, pruning, planting, grafting.
CONSTRUCTION
The main feature of the Robot is the Ability to find the grass in the field using Image processing. For this we are using a special purpose Web cam which will take photos inside the field and if the grass is found then he will inform the robot to cut the grass in the crop field and also he will pick the grass which has been cut by the robot.
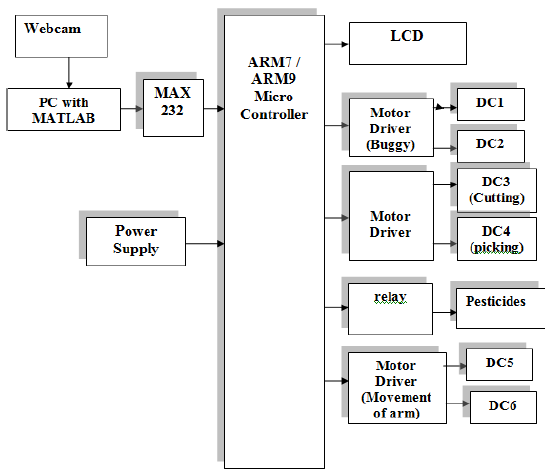
Fig. 1. Block diagram.
We will keep the maximum and minimum limit of plant growth. As soon as it crosses the maximum height of the plant then we will use cutting mechanism to cut the plant. Figure 1 shows block diagram of the whole bot that we are going to implement.
BLOCK DIAGRAM EXPLANATION
ARM 7
This generation introduced the Thumb 16-bit instruction set providing improved code density compared to previous designs. The most widely used ARM7 designs implement the ARMv4T architecture, but some implement ARMv3 or ARMv5TEJ. All these designs use a Von Neumann architecture, thus the few versions comprising a cache do not separate data and instruction caches.
Liquid Crystal Display
LCD is used in a project to visualize the output of the application. We have used 16×2 LCD which indicates 16 columns and 2 rows. So, we can write 16 characters in each line. So, total 32 characters we can display on 16×2 LCD.
Camera
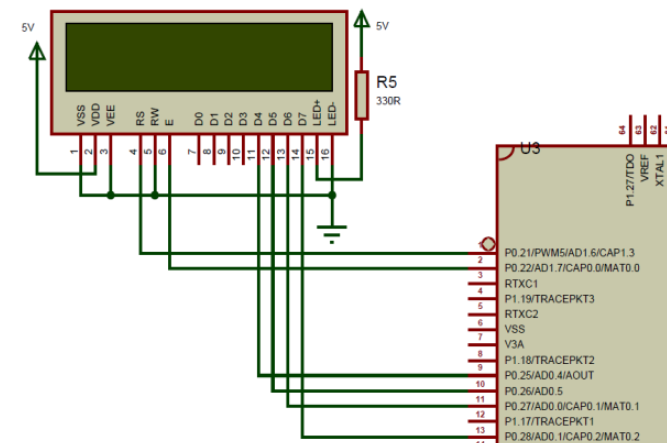
Fig. 2. LCD Used.
The Rs232 standard is used to interface the computer with the microcontroller. The computer is connected by the web camera for recognition. The matlab software window is used. Below figure 2 depicts the image of web camera.
PC
We already know about the facility of the mobile, so after receiving data from the webcam we can copy or use the same data in our PC. The PC and RF receiver can be interfaced with the help of the data cable DKU-50. We are using the MATLAB software in our PC for the user interface with the system. With the help of this MATLAB software any user can easily make the use of the system.
RS 232
RS 232 is a serial communication cable used in the system. Here, the RS 232 provides the serial communication between the microcontroller and the outside world such as display, PC or Mobile etc. So it is a media used to communicate between microcontroller and the PC.
DC Motor
DC motors are used to physically drive the application as per the requirement provided in software. The dc motor works on 12v. To drive a dc motor, we need a dc motor driver called L293D. This dc motor driver is capable of driving 2 dc motors at a time. In order to protect the dc motor from a back EMF generated by the dc motor while changing the direction of rotation, the dc motor driver have an internal protection suit. We can also provide the back EMF protection suit by connecting 4 diode configurations across each dc motor.
Dc Motor Driver (L293D)
The Device is a monolithic integrated high voltage, high current four channel driver designed to accept standard DTL or TTL logic levels and drive inductive loads (such as relays solenoides, DC and stepping motors) and switching power transistors. To simplify use as two bridges each pair of channels is equipped with an enable input.
WORKING
Here we are proposing an agricultural autonomous Robot. The Robot will have a cutting and picking mechanism as well as it will spray pesticides on the crops. So, in all this is a completely autonomous robot.
It has a camera which will give a live vision of the field so while it performs its basic operations we can monitor everything. For large farms a GPS based module can be installed depending on which we can fix a specific land to be harvested in which pattern or way.
After harvesting or cutting, it will pick up the crops and place it in a vessel which is beside the robot. A further spraying mechanism is also present in the robot which will spray the pesticides on the crops.
CONCLUSION
This paper has set out a vision of how aspects of crop production could be automated one. Although existing manned operations can be efficient over large areas there is a potential for reducing the scale of treatments with autonomous machines that may result in even higher efficiencies. The development process may be incremental but the overall concept requires a paradigm shift in the way we think about mechanization for crop production that is based more on plant needs and novel ways of meeting them rather than modifying existing techniques.
Source: IJARCCE
Authors: Ankit Singh | Abhishek Gupta | Akash Bhosale | Sumeet Poddar
>> 200+ Matlab Projects based on Control System for Final Year Students
>> 80+ Matlab Projects based on Power Electronics for Engineering Students