
ABSTRACT
A robotics-based guidance method is presented to guide a robot platform which is designed independently to drive through the crops in a field according to the designed concept of open architecture. Thus, the robot platform is designed in real time to guide the platform on the basis of detection of crop using Ultra-Sonic sensor.
The proposed system is basically developed to implement an agricultural production. This type of system is very useful in agriculture field where we need to spray the pesticide to different crops. This system automatically sense crop of both sides by using ultra-Sonic sensor. Embedded Chip ARM 7 LPC2148is heart of this work and the system and KEIL C software is used to code the algorithm.

Figure 2.4 : Overall view of proposed system.
BLOCK DIAGRAM DESCRIPTION
The block diagram of proposed system consists of three main components:
- Transmitter
- Receiver
- Sprayer
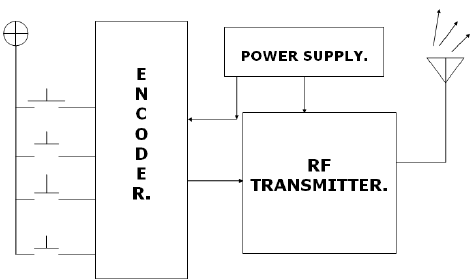
Fig 2.1.1: Block diagram of Transmitter.
The transmitter consists of Keypad, Encoder and RF transmitter.
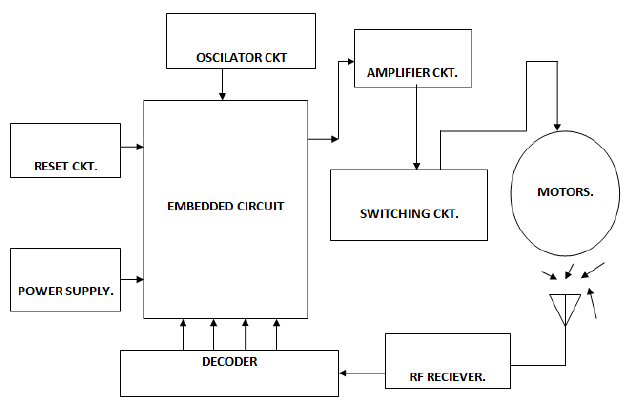
Fig 2.2: Block diagram of Receiver.
The Receiver consists of RF Receiver, Amplifier and Reset Circuit.
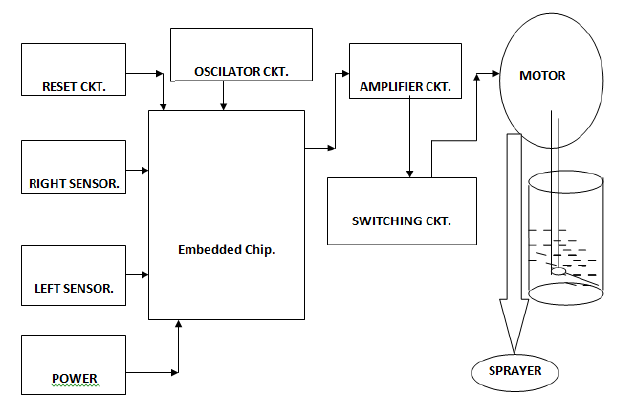
Figure 2.3: Block diagram of Sprayer.
The Sprayer consists of Switching circuit, Motor, Camera, Ultra-sonic sensor Oscillator, Embedded Chip.
WORKING OF AUTOMATIC PESTICIDE SPRAYER
Automatic pesticide sprayer is operated in three stages:
- Transmitter.
- Receiver.
- Sprayer
Transmitter Circuit
Keypad has 4 keys. Each key is designed to act as a switch. Thus the transmitter has a 4 buttons namely F [Forward], R [Reverse], L [Left], R [Right] and there are 4 corresponding outputs at the receiver. Each key is designed to drive a vehicle in one particular direction.
The encoder codes the signal to retain the data and thus minimizes the data loss. The encoded data is then transmitted from the transmitter end to the receiver end using a RF transmitter. The RF TX operates with the frequency of 433 Hz. 6V DC Battery is used as power supply circuit for this transmitter circuit.
Receiver Circuit
The encoded data is received from the receiver end using a RF receiver and given to the decoder. The decoder decodes the signal to retain the data and thus minimizes the data loss. The RF RX also operates with the frequency of 433 Hz.
Operation
Here the receiver circuit used to change the direction of moving vehicle. Let us consider any one key is pressed, say the key L is pressed, the output line 1 of the decoder is activated or the decoder outputs signal on its first o/p line. This is then given to the ULN2803 amplifier. The signal which is given to the amplifier gets inverted and the inverted signal is then given at the output. i.e., logic 1 at the amplifier input is converted as logic 0 at the output.
Sprayer
This system has two sensors, one sensor is placed in left side to detect the plants at left side and another sensor is placed in right side to detect the plants at right side. The outputs of both these sensors are given to the ARM. When this sensor does not detect any plant they will give logic zero at their output. When right side sensor detect the plant it will give logic high to a particular pin of ARM processor, when processor get logic high on its input pin, it will make a particular output pin port 1.17 as high for some delay. This is then given to the ULN2803 amplifier.
FUTURE SCOPE
Technology is ever growing and there is always scope for improvement and advancements in every field of work.
In future we can implement this system that can give indication after completion of pesticide. We can also make use of GSM model to send message when pesticide is finished.
RESULTS
This type of system is very helpful for agriculture purpose where need to spray the pesticide to different crops. Currently we use a system that increase the human effort and it also not comfortable. This pesticide sprayer robot move in fields and robot has sensors to detect the plants on both sides.
In this system we use small tank for pesticides and motor. If it detects plant then automatically it will starts to spray. This system also has a wireless camera which can capture the image and display it on the display. By making some modification we can use this system for other type of application.
Source: IJSART
Authors: Shalini D V
>> More Wireless Embedded Projects for Engineering Students