
ABSTRACT:
This project is intended to help Professor Andrew H. Bass research team from department of Neurobiology and Behavior studying and understanding aggressive behavior between fishes. Our group’s MEng project is building a small toadfish model that researchers can put in the tank to study fish behavior. This project can be divided into two parts.
One is the toadfish model, which is manufactured by 3D printing technology and soft silicone casting technique, and can be moved around by a mechanical connection to the toadfish model. The other part is waterproof speaker system, which can produce a loud sound underwater.
The environment that the fish robot model must survive includes seawater and rough handling by real fish. This toadfish model with underwater speaker system could bring a lot benefits for scientists to study the aggressive behavior between toadfish.
IMPLEMENTATION
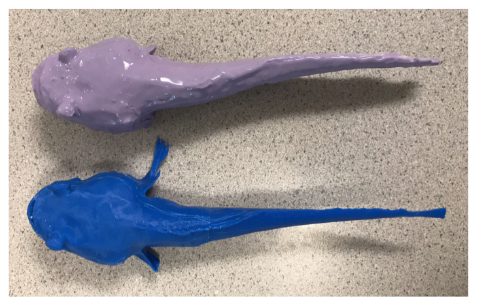
3D Model:
There are four steps to build a real-size toadfish model:
- CT Scanning of a real fish
- Processing the scanned data on computer.
- Using 3D printer to print the model
- Casting a soft silicone model.
The second step is the most complex and vital in building the model
CT Scanning
Professor Bass from the Biology Department had a real toadfish specimen warped in a container. The specimen was then put into a CT scanner and went through a thorough scanning. The scanner works in a slice-by-slice manner, which means the fish is taken apart into tiny slices, each output corresponds to a slice of the fish. The granularity is so small that that scanned data contains highly detailed information of the toadfish physical shape.
Data Processing
Processing the scanned data is the most important step in building the 3D model, yet it is also the most complex step. Multiple tools are needed to work together to produce the final print-ready file.
Sound System:
Audio Amplifier
The audio amplifier can amplify sound that is given from sound source input, such as computer and phone. The main component in this circuit is LM386, which is a low voltage audio amplifier and frequently used in battery powered music devices like radios, guitars etc.

First Version Audio Amplifier Circuit.
The speaker
To produce a loud sound underwater, the speaker needs to vibrate strongly to generate enough energy to push the water vibrates as well. However, the toadfish model is only around 15 cm in length, 5 cm in width, and 4cm in height, which means placing a loudspeaker, which can meet the standard of vibration, into the fish body is almost impossible. To deal with this problem, we came up with a solution, using a balloon as the interface between air and water to transfer sound wave.

Second Version of Toadfish Sound Simulation System.
Sound Transmission Mechanism:
Sound is basically produced by vibrations, which propagate as mechanical wave of pressure and displacement through transmission medium. In our designed sound system, with the strong vibration produced by the speaker, the air in the sealed box is contracted and expanded, and its vibration intensity is the same as speaker. Then, the air in the sealed box propagates to the thin Tygon tube and balloon.
TESTING AND RESULTS
The testing for the system was done in an accumulative way. We first test the audio amplifier module, and then add the speaker module, and test the whole sound system underwater. To test audio amplifier module, we chose to use 100 Hz sine waves as audio input, and check the output waves by using oscilloscope.
After improvement of sound intensity issue, we tested the second version design of toadfish sound simulation system . This design’s performance was much better. The highest sound intensity underwater was about 75dBfor 100Hz test tone and real toadfish sound, and this result perfectly met the project requirement.
CONCLUSION
In conclusion, in this project we did research on aggressive behavior of toadfish, such as, physical attack, growling, and grunting. Also, we spent a significant amount of time on 3D printing, micro waterproof speaker, and acoustic interface issues, etc.
We built a small fish model that can be used for studying fish behavior, and an underwater loud speaker system. Out project meet the requirements, and the final results and outcomes of our MEng project are that the fish robot model is able to produce a loud sound underwater and to move around by a mechanical connection to the model; the fish model is able to survive includes sea water environment and rough handling by real fish. Though this project, we acquired technical skills and also the ability to work with scientists to produce a research product, which we cannot learn from any classes.
FUTURE WORK
This project can be further improved by adding more features to make the fish model able
to interact with real toadfish.
- Improvement on toadfish model to make the fish fins and tails automatically move underwater like real fish.
- Improvement on audio amplifier circuit to produce louder sounds.
- Adding an underwater video camera embedded in the fish model to make it
interactive.
Source: Cornell University
Authors: Jiayu Dong | Hongshu Ye | Lu Lu