
ABSTRACT
Embedded systems are playing an increasingly import ant role in control engineering. Despite their popularity, embedded systems are generally subject to resource constraints and it is therefore difficult to build complex control systems on embedded platforms. Traditionally, the design and implementation of control systems are often separated, which causes the development of embedded control systems to be highly time-consuming and costly.
To address these problems, this paper presents a low-cost, reusable, reconfigurable platform that enables integrated design and implementation of embedded control systems. To minimize the cost, free and open source software packages such as Linux and Scilab are used. Scilab is ported to the embedded ARM-Linux system. The drivers for interfacing Scilab with several communication protocols including serial, Ethernet, and Modbus are developed.
Experiments are conducted to test the developed embedded platform. The use of Scilab enables implementation of complex control algorithms on embedded platforms. With the developed platform, it is possible to perform all phases of the development cycle of embedded control systems in a unified environment, thus facilitating the reduction of development time and cost.
THE SCILAB/SCICOS ENVIRONMENT

Figure 1. A screen shot of Scilab/Scicos on a PC
It is possible for the user to program new blocks in C, Fortran, or Scilab Language and construct a library of reusable blocks that can be used in different systems. Scicos allows running simulations in real time and generating C code from Scicos model using a code generator. Scilab/Scicos is the open source alternative to commercial software packages for system modeling and simulation such as Matlab/Simulink. Figure 1 gives a screen shot of the Scilab/Scicos package.
EMBEDDED CONTROL SYSTEMS DESIGN

Figure 2. General structure of embedded control systems
The general structure of an embedded control system wit h one single control loop is shown in Figure 2. The main components consist of the physical process being controlled, a sensor that contains an A/D (Analog-to-Digital) converter, an embedded computer /controller, an actuator that contains a D/A (Digital-to-Analog) converter, and, in some cases, a network.
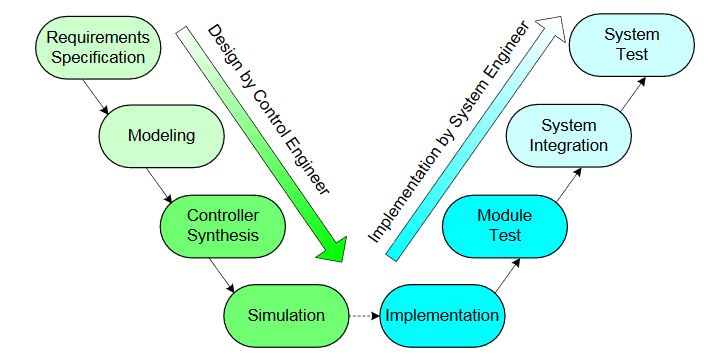
Figure 4. Traditional development process of control software
Traditionally, the development cycle of a control system consists of two main steps: controller design and its implementation. These two steps are often separated, as shown in Figure 4, where the so-called V-model is given. While the controller design is usually done by control engineers, the implementation is the responsibility of system (software) engineers.
PLATFORM IMPLEMENTATION
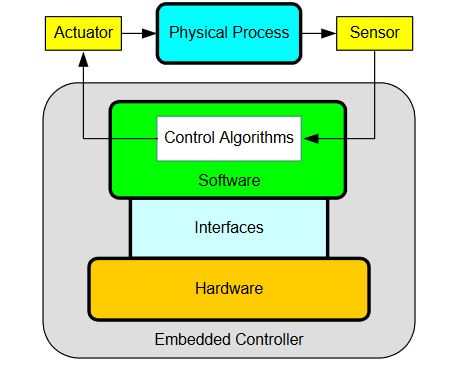
Figure 6. Layered architecture of the developed embedded platform
In this section, we describe the implementation of the above-mentioned platform for developing embedded control systems. As shown in Figure 6, this platform is composed of three main components: hardware, software, and interfaces. In the following, details of each component are given, respectively.
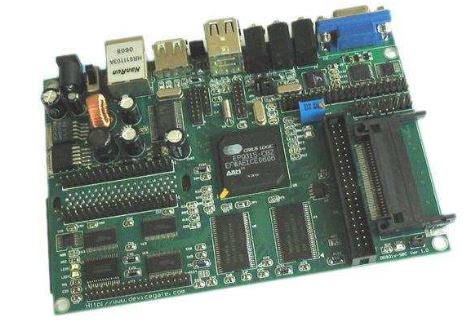
Figure 7. The development board used
The development board used in this work is based on the EP9315 processor from Cirrus Logic, as shown in Figure 7. The EP9315 is a highly integrated system-on-chip processor for consumer and industrial electronic products. It features an advanced 200 MHz ARM920T processor design with a memory management unit, separate 16KB instruction cache, 16KB data cache, 64MB SDRAM, and 32MB flash memory.
EXPERIMENTAL TEST
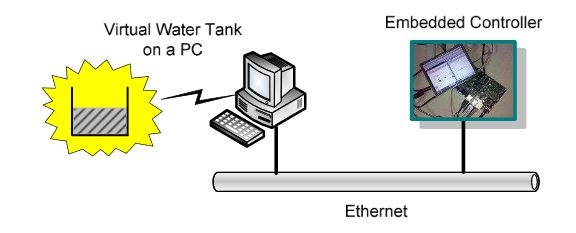
Figure 11. Experiment system
In this section we conduct experiments on the developed embedded control platform. A water tank controller is implemented. The setup of the experimental system is shown in Figure 11. For simplicity the water tank is simulated by a PC running Scilab/ Scicos. The PC and the embedded controller are connected using Ethernet.
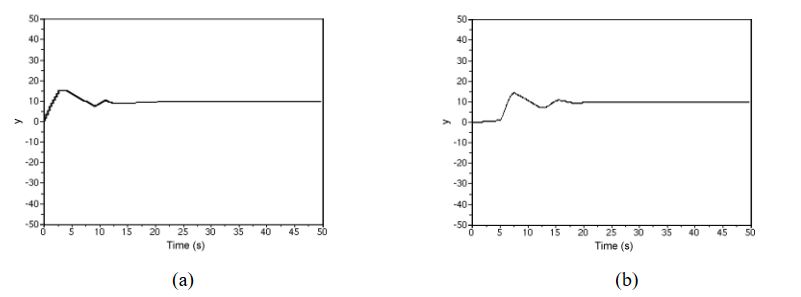
Figure 14. Control performance of the experiment system. (a) System output (h = 0.1s); (b) System output (h = 0.5s)
The control performance of the system is shown in Figure 14, where the system output (denoted y) is given for different sampling periods, i.e., h = 0.1s and 0.5s, respectively. It is seen that the control system delivers quite good performance, especially when the sampling period is 0.1s.
CONCLUSIONS
In this paper we have developed an embedded platform that can be used to design and implement embedded control systems in a rapid and cost-efficient fashion. This platform is built on free and open source software such as Scilab and Linux. Therefore, the system development cost can be minimized. Since the platform provides a unified environment in which the users are able to perform all phases of the development cycle of control systems, the development time can be reduced while the resulting performance may potentially be improved.
In addition to industrial control, the platform can also be applied to many other areas such as optimization, image processing, instrument, and education. Our future work includes test and application of the developed platform in real-world systems where real sensors and actuators are deployed.
Source: Zhejiang University
Authors: Longhua Ma | Feng Xia | Zhe Peng
>> 50+ Matlab projects for Digital Image Processing for Final Year Students
>> 200+ Matlab Projects for Control System for Final Year Students
>> More Analog Communication Projects using Matlab for Final Year Students
>> More Matlab Projects on Embedded Systems for Engineering Students