
ABSTRACT
The interconnection of distributed resources requires specific voltage regulation, monitoring, protective relaying, power quality, and islanding detection. For this reason IEEE established standard IEEE 1547 that ensures the compliance with such requirements and it will help formulate technical specifications for grid interconnection with Distributed Generator (DG) resources.
In search of meeting the IEEE 1547 standard requirement of detecting unintentional islanded operation, there has been ongoing research to develop anti-islanding methods that can detect the different changes that can occur when the grid is disconnected. A team of Electrical Engineering faculty at Indiana University Purdue University Indianapolis has worked previously on testing a DG unintentional Islanding Detection Scheme.
This scheme uses an active anti-islanding method in which a small 1 Hz perturbation signal is added into the DG system and it helps detect when the grid is disconnected. The scheme uses the premise that a frequency deviation caused by perturbation to the system is smaller when the grid is connected than when it is in an island.
In an initial dynamic simulation model for the islanding detection scheme, a two-machine microgrid system is used to explore frequency and voltage responses when the grid is disconnected. In this thesis, the two-machine microgrid is expanded to a ten-machine system so it can be shown that the frequency deviation caused by a perturbation signal is much smaller when the grid is connected even for a larger DG network. The 1 Hz component of the DG electrical frequency in a multiple machine microgrid system is also calculated in this thesis.
This project was conducted in different stages. First, it was necessary to calculate the steady state power flow and electric power of a three-machine system and update the two-machine MATLAB program with the necessary changes. After making the changes, it was necessary to simulate the system and adjust the inertia of the machine that represents the grid to ensure that the simulation output was close in magnitude to previous testing results.
When the three-machine system was successfully generated, a brand new program was created so a multiple machine system could be simulated. Then the multiple machine program was used to simulate and experiment with up to a ten-machine system. Finally a program to calculate the 1 Hz component of the DG electrical frequency was generated and used to show that the magnitude squared of the 1 Hz component is inversely proportional to the number of machines connected to the system. These last findings will later help set the threshold for islanding detection appropriately for different numbers of DG.
DYNAMIC SIMULATION MODEL FOR A THREE MACHINE SYSTEM

Fig. 2.5.: Three machine system simulation results after calculating matching load
With the new load value, new results were obtained (See Figure 2.5). The new resistance/load value allowed the system to stabilize and show the same behavior of previous results with the two machine system.
DYNAMIC SIMULATION MODEL FOR A MULTIPLE MACHINE SYSTEM
Before creating a new MATLAB program to simulate a multiple machine system it was necessary to model and simulate a four machine system. This four machine model helped determine a pattern to update the admittance matrix systematically (or in a loop) to facilitate programming the MATLAB code that simulates a three or more machine system. A similar process to the process shown in Chapter 2 was followed for the four machine system.
- Steady State Power Flow and Electric Power Calculation (Four machines)
- Program Development for Multiple Machine Simulations
CALCULATION OF 1HZ COMPONENT OF DG FREQUENCY IN MULTIPLE MACHINE SYSTEMS
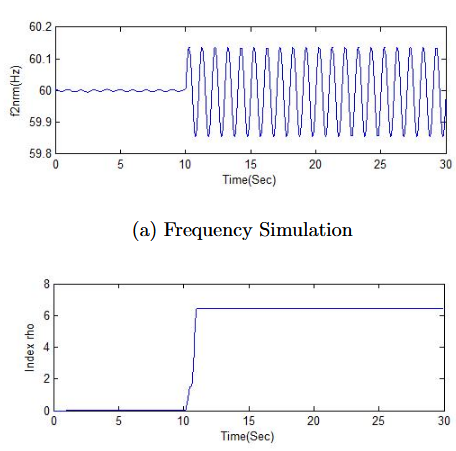
Fig. 4.1.: Two machine system 1Hz component calculation results
Figures 4.1 through 4.3 correspond to the frequency simulation and rho index calculation of the 2, 4, and 7 machine systems respectively. It also shows a column that shows the values of the perturbation strength PG2 (0) for each different system size. The normalized perturbation value is given by dividing the ρ index by the perturbation strength.
CONCLUSIONS AND RECOMMENDATIONS
The perturbation method for islanding detection has been tested and shown to be effective for one to six DG in parallel. In every simulation, one machine represents the grid, and the remaining machines represent DG. Therefore the seven machine system in this thesis represents six parallel DG and the grid. When adding the sixth DG, the simulations show instability. Using simulations it was verified for up to six DG in parallel that a frequency deviation caused by perturbation to the system is smaller when the grid is connected than when the DG is in an island. Therefore the proposed island detection method will probably work for up to six DG in parallel.
Future Work
The next step of this research is to test practically the results obtained in the simulations and show compliance with IEEE Standard 1547.1. To complete this task it is important to consider two design parameters involved: the strength of the perturbation signal, and the threshold value. Instead of having a constant perturbation strength and a threshold that varies with the number of machines, it would be possible to always use the same threshold and vary the perturbation strength depending on the number of DG. It seems simpler to always have the same perturbation strength and vary the threshold.
Source: IUPUI
Author: Diana C. Vasquez
>> MATLAB Project Ideas and Titles for Electrical & Electronics Engineering Students
>> Top 50+ MATLAB based Simulation Mini Project Topics & Final Year Project Titles for ECE Students
>> Simple Matlab Projects for EEE Final Year Students
>> 80+ Matlab Projects based on Power Electronics for Final Year Students