
ABSTRACT
Location service is one of the primary services in smart automated systems of Internet of Things (IoT). For various location-based services, accurate localization has become a key issue. Recently, research on IoT localization systems for smart buildings has been attracting increasing attention. In this paper, we propose a novel localization approach that utilizes the neighbor relative received signal strength to build the finger-print database and adopts a Markov-chain prediction model to assist positioning.
The approach is called the novel localization method (LNM) in short. In the proposed LNM scheme, the history data of the pedestrian’s locations are analyzed to further lower the unpredictable signal fluctuations in a smart building environment, meanwhile enabling calibration-free positioning for various devices. The performance evaluation conducted in a realistic environment shows that the presented method demonstrates superior localization performance compared with well-known existing schemes, especially when the problems of device heterogeneity and WiFi signals fluctuation exist.
RELATED WORK
Recently, wireless localization has become a focused research topic in the IoT context and a variety of solutions have been proposed. The IoT indoor localization approaches can generally be divided into two categories: passive method and active method. In the passive localization approach, the tracked person (even a smart object) does not carry any electronic device and actively participate in the positioning process.
In the active localization case, tracked person (even smart object) carries a physical electronic device, which can collect and process some information and send the results to a localization server for further processing. Relatively mature localization systems may be classified into three categories according to the system requirements and the used techniques:
- location-sensor-infrastructure-based systems
- wave-propagation-modeling-based systems
- location-fingerprinting-based systems.
PRELIMINARY OF FINGERPRINTING BASED LOCALIZATION
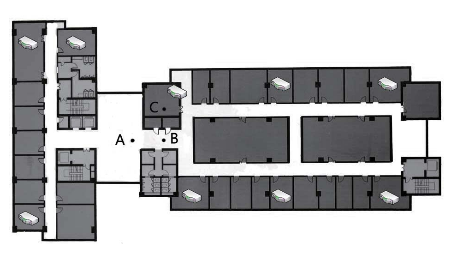
Fig.1. Floor plan of localization environment
To verify the effectiveness of theoretical analysis, we performed the following experiment by collecting RSS values at points A and B using four different smartphones (Galaxy S3, MX2, Mi3, Ascend P6) throughout the day. The experiment was carried out on the ninth floor of a 17-story building. As shown in Fig.1, points A and B are both in the corridor, and their distance is about 3m, while point C is in the room and the distance between B and C is also about 3m. The measured value of each point was collected ten times and the average taken as the RSS value to remove randomness.
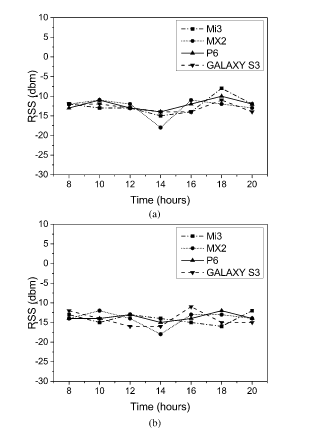
Fig.3. NR-RSS fluctuation. (a) NR-RSS fluctuation of locations A and B. (b) NR-RSS fluctuation of locations B and C
As seen from the experiment results, we learn that the RSS value of a particular location can fluctuate throughout the day. However, as Fig.3 shows, the RSS difference values of points A and B stay relatively stable during the day. Considering that points A and B are both in the corridor and very close, these environmental dynamics produce the almost same effect, so the RSS values of points A and B change almost synchronously. While point B is in the corridor and point C is in room, in their surroundings, there exist some differences that influence RSS difference value of points B and C. But as shown in Fig.3(b), such an influence is in an acceptable range.
MARKOV PREDICTION MODEL
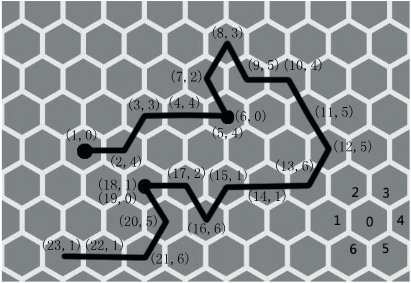
Fig.5. Random pedestrian’s trajectory
Let us take an example; a random object’s moving trajectory is shown in Fig.5. The illustration at the bottom-right is the orientation index corresponding to the object’s movement state. The black circle represents where the object stayed. The orientation of object movement is represented as a pair of numbers. The first number in parenthesis is the sequence number and the second is the orientation index, namely, the object’s movement state.
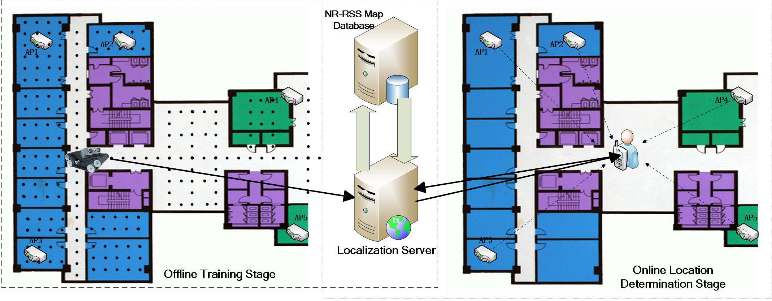
Fig.6. Illustration of workflow in LNM
In this section, we present the architecture and work- flow of the proposed localization system leveraging the LNM algorithm in detail. The system mainly operates in two stages: offline training stage and online location determination stage, as shown in Fig.6. In the offline stage, surveying users use smartphones to collect RSS data at all designated locations and then send them to the remote localization server. The server processes this information to get NR-RSS, building up the NR-RSS fingerprint map database.
LOCALIZATION ALGORITHM
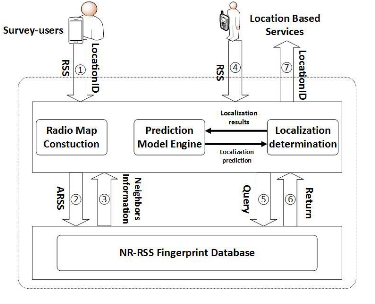
Fig.7. Data flow in LNM
In the online location determination stage, there are two localization methods. At the beginning of localization, as there are not enough movement data for setting up the MPM,NR-RSS matching method mainly works. The localization process runs as follows: the mobile devices can scan the WiFi signals and periodically send information to the localization server.
The server combines the received RSS with the history neighbor RSS information to obtain the NR-RSS; then the NR-RSS is compared with all entry locations in the NR-RSS fingerprint database and the most matching one is determined to finish the location estimation. With the mobile device moving, the trajectory of its movement is constantly recorded. When the historical data reach a certain amount, location estimation is mainly performed by the MPM. That is to say, during this phase, location estimation is mainly based on the MPM and supplemented by NR-RSS matching. The data flow in our localization algorithm is shown in Fig.7.
PERFORMANCE EVALUATION

Fig.8. Comparison of localization using different location fingerprint
In addition, in order to verify the performance of NR-RSS in localizing, we, respectively, implement the localization system based on NR-RSS and other location finger- prints, including signal strength difference (SSD) and RSS. As illustrated in Fig.8, the localization accuracy of the three systems is compared; obviously, the localization system based on NR-RSS outperforms the localization system based on SSD and RSS.
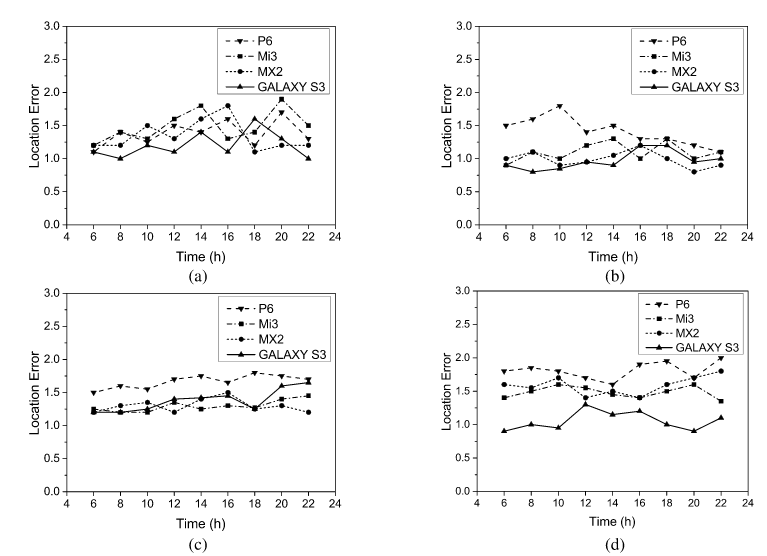
Fig.9. LNM location error on different smartphones used for map building. (a) Ascend P6 used for map building. (b) Mi3 used for map building. (c) MX2 used for map building. (d) Galaxy S3 used for map building
This evaluation mainly analyzes the performance of LNM with different devices to demonstrate that our algorithm works well under heterogeneous devices. In the experiment, four different smartphones were used to build fingerprint map and localize. For each time experiment, only one device was used for building fingerprint map, while four
smartphones are used to localize each time. Localization was performed at different times of the day to check the performance of the systems against environmental dynamics. The situation of location error for LNM is shown in Fig.9. Therefore, our algorithm can achieve stable localization accuracy against device heterogeneity.
CONCLUSION
In this paper, we have proposed and evaluated a novel method, named LNM, which uses NR signal fingerprint and Markov chain for localizing in smart building environment. The proposed fingerprint radio map building and localization techniques are based on the neighbor relationship. Our techniques provide robust and stable localization accuracy against device heterogeneity and environmental dynamics, which ensures the efficiency of localization. Experiments using heterogeneous smartphones have confirmed that LNM is feasible and reliable. LNM can achieve high localization accuracy with about 1.5m error on the average. Our LNM outperforms other systems in the literature: RADAR,Zee, and WILL.
As LNM can localize in real time with high accuracy, it has reached a level of maturity that allows for the practical realization of IoT localization solutions and services, and has potential for large-scale deployment in the IoT scenarios. For future work, we will evaluate other mobile devices such as aeroterrestrial drones (e.g., WiFiBot and Parrot) in complex buildings, as such smart objects will be used in the future smart buildings for supporting many activities (cleaning, emergency, disabled people support, and so on).
Source: Wineyard University
Authors: Kai Lin | Min Chen | Jing Deng | Mohammad Mehedi Hassan | Giancarlo Fortino
>> Latest Sensor based IoT Projects for ECE/CSE Students
>> WiFi based IoT Projects for Engineering Students
>> 200+ IoT Led Projects for Final Year Students
>> More Wireless Embedded Projects for Engineering Students