
ABSTRACT
In a time when the population and life expectancy increase, the demands on health care change. The biggest cost in Swedish health care today is related to accidents regarding falls of old people. This Master’s thesis presents a solution to fall detection and logging of data from falls. Falls themselves are hard to stop, but there are several factors behind falls that can be changed in order to prevent them.
In this Master’s thesis the development of a fall detection system and it’s results are presented. The system is based on a Microsoft Kinect and a Raspberry Pi 2, these components are standard, of-the-shelf products with a total price less than 2000 SEK, which is significantly less than the price of the hardware used in the majority of other projects in this field. Using consumer components opens up the possibility for others to further develop the system in the future. The developed solution uses thresholds based on acceleration and height to identify falls. These parameters have been used alone in earlier studies, by using the unique technique of combining them gives more accurate results.
The development of the system was divided in to two phases. In the first phase a data collection was carried out, 200 falls and activities performed by a total of 5 test subjects were logged and the data analyzed. The results were used when developing the final fall detection software. In the second phase, 75 falls and activities where performed by two test subjects in order to test the accuracy of the software. Combining acceleration with height proved to be a good solution, detecting falls with a sensitivity of 92 percent and a specificity of 96 percent.
METHOD
The work with this thesis was divided into two parts, a theoretical part were the techniques and research in fall detection was covered and a practical part were the software was implemented and tested. In the beginning of the project a mapping of the different phases was carried out. The phases were divided into tasks to get an understanding of the scope of the project.

Figure 2.1: The work process of this Master’s thesis.
A research study was conducted to identify potential traps, what parts could be time consuming and which boundaries that had to be set due to the time limit of the project. The focus was on techniques currently used and how to break down the solution in smaller parts. In the beginning a big part of the project was to find out how the subject related to the society today. The latter part of the thesis covers the implementation and testing of the fall detection system. Figure 2.1 shows a flowchart of the work process.
RESEARCH ON HOW ELDERLY FALL
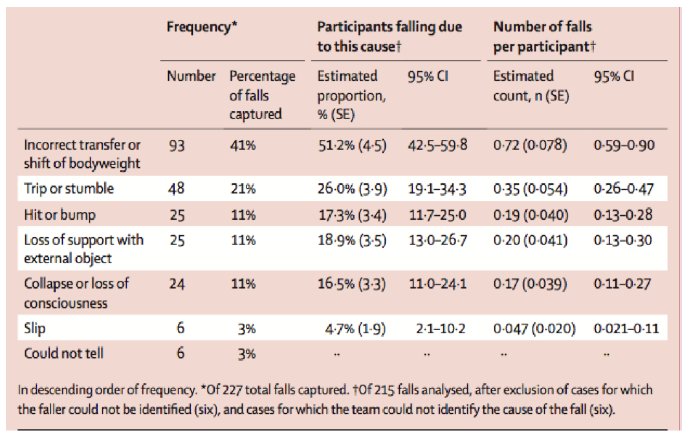
Figure 3.1: The most common types of falls for old people.
In their article from 2013 Robinovitch et al. focus on how elderly people fall. They state that the most common cause for falls is incorrect transfer of body weight, or shift of body weight. 41 percent of the captured falls depended on transfer or shift of body weight. Figure 3.1 shows the reasons behind the most common types of falls. The data from this study was selected because of the quantity of data and the fact that the data was collected in nursing homes, which is a possible place the system presented in this thesis could be used in in the future.
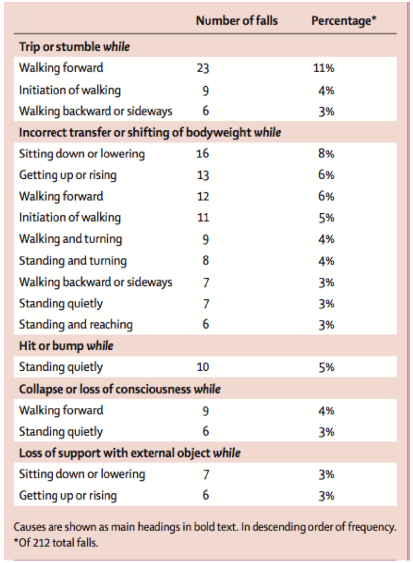
Figure 3.3: The most common activities when falls occur, divided into categories.
Furthermore, the study compared the different activities undertaken before falling, this can be seen in figure 3.3. As shown in figure 3.3, 14 percent of the falls occur when rising or lowering the body. This happens when sitting down or rising.
STATE OF THE ART
During the work with this thesis, a large amount of articles have been read to gain insight of different approaches to fall detection. The most common techniques are to use cameras together with accelerometers. Another approach uses sensors to detect abnormalities in the daily life that can relate to falls. The drawback with sensors is that is take a lot of data to determine what is normal behavior.
Other approaches include using shape based fall characterization using depth cameras and using radar signals and signal processing. One common approach is to use gyroscopes together with accelerometers. A system that is integrated in a device is the SmartCane, an assistive cane with a built in fall detection system using accelerometers. Another technique is to integrate the fall detection system in the home, using floor pressure sensors and an infrared camera.
Three approaches to fall detection will be described at a more detailed level in this thesis. These approaches are presented since they differ in how they solve the problem, and therefore can give valuable insights when analyzing the results from the proposed solution in this thesis.
- System using Audio, Camera and Accelerometer
- Fall detection using smart phones
- Night Guards
SELECTION OF TOOLS AND TECHNIQUES
The litterature review described in the first part of this thesis gave valuable insights and good ideas of how to develop a fall detection system. This chapter covers different techniques to detect falls used in related projects, a description of the selected hardware and a brief introduction to the implementation approach.
- Techniques used today
- Components
- Implementation Approach
DESIGN AND IMPLEMENTATION
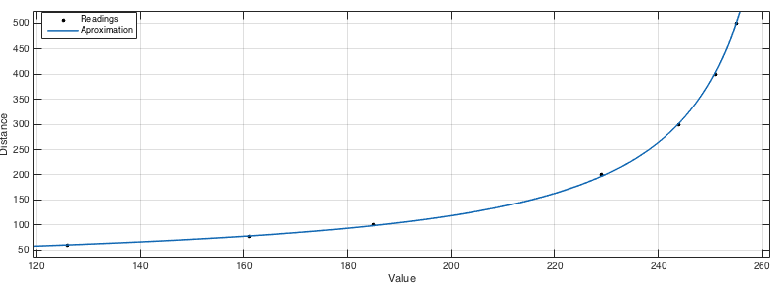
Figure 6.1: Plot of h(x).
The output from the tool was values for a, b and c which makes the function, h(x), an estimate of the depth function. This gives the distance in centimeters from any given pixel value in the depth map. Figure 6.1 shows a plot of h(x) together with the measured values.

Figure 6.4: Example of a vertical histogram.
A common technique for ground plane detection when working with depth sensing cameras is using V-disparity map. With V-disparity map, the disparity is calculated for each pixel in the image, the disparity in turn populates a histogram for each row in the image, called a disparity map. Since the floor in theory always is at the maximum distance from the sensor in each row, the highlight corresponding to the highest disparity in each row should correspond to the floor.
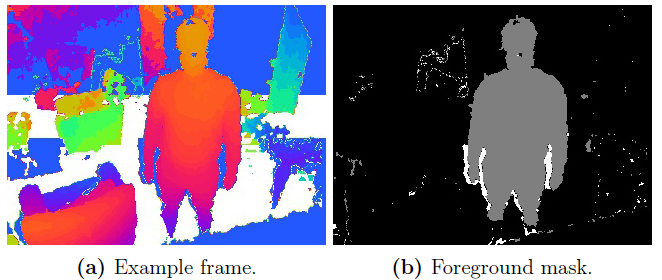
Figure 6.7: Example of a frame with corresponding foreground mask.
When BackgroundsubtractorMOG2 has processed a frame, a gray scale foreground mask is returned. In the foreground mask black parts are considered background, gray shadows and white foreground. To remove shadows the mask is then alternated to change the gray parts to black, which only leaves objects considered to be in the foreground in the mask.
DATA COLLECTION AND TESTING
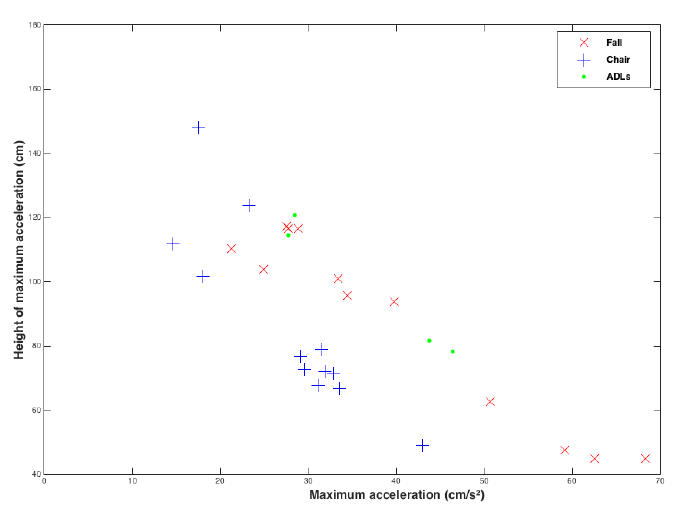
Figure 7.1: Plot of all falls and ADLs from one of the test subjects in the first data collection. The figure shows the maximum acceleration and the height were it occurred for all the falls and ADLs.
Figure 7.1 shows a plot of the result from the first test subject. The complete result from all test subjects is shown in appendix B. During each fall a photo was saved each frame. This was done to be able to compare the data with the actual fall. In the finished software no frames were saved. The data was analyzed in MatLab and using Microsoft Excel datasets for each test subject were created.
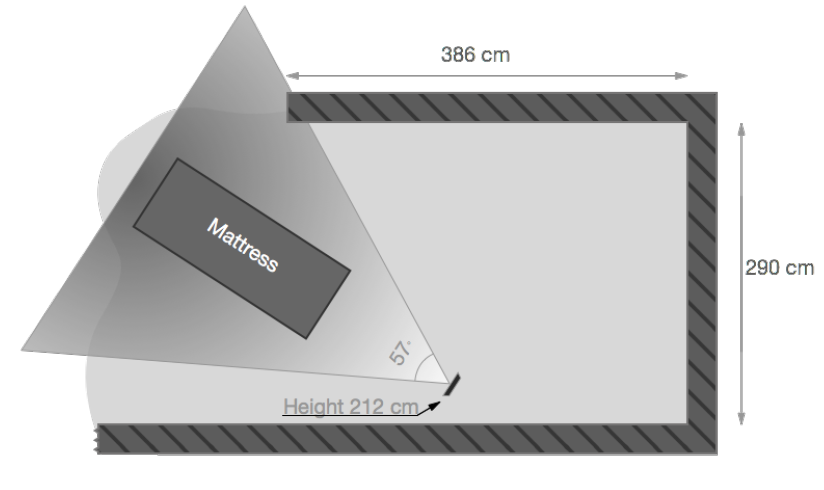
Figure 7.8: Sketch of the setup used in the final test.
In the final test three activities were tested and a total number of 75 tasks took place. During the test the camera was placed at a height of 212 centimeters, which is roughly the same as during the data collection. As earlier a mattress was used to reduce the force of impact from the falls.
ETHICAL CONSIDERATIONS
This solution is used to monitor a person in its home. The home is a private place, so it is important for the users to have control over what happens with the information from the camera. In this case the 3D picture from the camera is used, which means no clear details can be determined from the frames. It is still possible to see what the users are doing though.
In the final system, frames from the camera are saved temporarily in the computer’s memory, which means that they are hard to access and only stored as long as the system is running. The data saved outside the computer’s memory is the coordinates of detected objects stored in the logfile. This can be seen an anonymous format which depicts where in the room moving objects are at given times.
- Software design
- User
- Test Subjects
DISCUSSION
The goal when the project started was to achieve a sensitivity of 95 percent. The result from the final tests showed a sensitivity of the system of 92 percent. With more testing this could be improved. As mentioned, a quick analysis of the data from the final tests showed that the sensitivity could have been 100 percent without affecting the specificity. This would be possible if the threshold for the height would be increased to 85 centimeters. Changing the threshold would however make the system more prone to report false negatives since the interval between the threshold for falls and the values of ADLs would be much closer to each other.
The results are better than the results from the studies covered in chapter 4. This can be an indication that the goals on sensitivity and specificity were to high. It can also be the result of different testing methodologies or the difference in the number of test cases.
FUTURE WORK
The ambitions with this thesis was to create a fall detection system using low cost, standardized components. One thing that could be done is to redesign the appearance of the system. The system monitors a person in a room in a discreet way. The frames are never saved and only data from the depth camera is used. To make older people feel more comfortable with this aid, a redesign could help.
- Hip airbag
- Triggers
- Software
- Hardware
CONCLUSION
The purpose with this master thesis was two answer three questions.
- How can a system which detects falls using low cost components be developed?
- How to distinguish between falls and non-falls?
- Which performance limitations, if any, do depth sensing cameras have on fall detection?
The first question can be considered answered in this thesis, the work covered has resulted in an implementation of a proof of concept. The results presented in section 7.2 showed acceptable results. The idea of using multiple attributes to determine if a fall has occurred also proved successful as the tests showed.
The result of the final testing showed a specificity of 96 percent, this shows that the software in a large extent can distinguish between falls and natural movements. The result shows better results than in similar studies. It could be possible to get a better result with more testing and calibration of the thresholds.
One of the limitations of active cameras, or more specifically Microsoft Kinect, is the field of view and the range of the camera. These limitations give a narrow working area of the proposed solution. High end active-cameras might solve this problem, but since this thesis focused on low cost-components, this has not been covered in this thesis. More advanced cameras might also increase the demands on the computer used.
Today’s market has also been covered which showed that there is room for new solutions to reduce the cost in the health care regarding falls amongst elderly people. The proposed solution will not prevent people from falling, but it could be a possible substitute to products used today and at the same time provide researchers with data. The system might help to get people assistance sooner after falls have occurred.
Source: Lund University
Authors: Jonathan Knorn | Fredrik Lindholm
>> More Matlab Projects on Audio Processing for Final Year Students
>> 200+ Matlab Projects based on Control System for Final Year Students