
ABSTRACT
A current trend in the development of assistive devices for rehabilitation, for example exoskeletons or active orthoses, is to utilize physiological data to enhance their functionality and usability, for example by predicting the patient’s upcoming movements using electroencephalography (EEG) or electromyography (EMG).
However, these modalities have different temporal properties and classification accuracies, which results in specific advantages and disadvantages. To use physiological data analysis in rehabilitation devices, the processing should be performed in real-time, guarantee close to natural movement onset support, provide high mobility, and should be performed by miniaturized systems that can be embedded into the rehabilitation device.
We present a novel Field Programmable Gate Array (FPGA)-based system for real-time movement prediction using physiological data. Its parallel processing capabilities allows the combination of movement predictions based on EEG and EMG and additionally a P300 detection, which is likely evoked by instructions of the therapist.
The system is evaluated in an offline and an online study with twelve healthy subjects in total. We show that it provides a high computational performance and significantly lower power consumption in comparison to a standard PC. Furthermore, despite the usage of fixed-point computations, the proposed system achieves a classification accuracy similar to systems with double precision floating-point precision.
RELATED WORK
Electroencephalography (EEG) data can be analyzed to detect neural activity related to movement intentions or upcoming movements, such as Event-Related Desynchronization/Synchronization (ERD/ERS) or Movement Related Cortical Potentials (MRCPs). ERD/ERS reflects changes in the oscillatory activity of neural networks by an attenuation or increase in the power of specific frequency bands.
HARD-AND SOFTWARE ARCHITECTURE OF THE HYBID SYSTEM
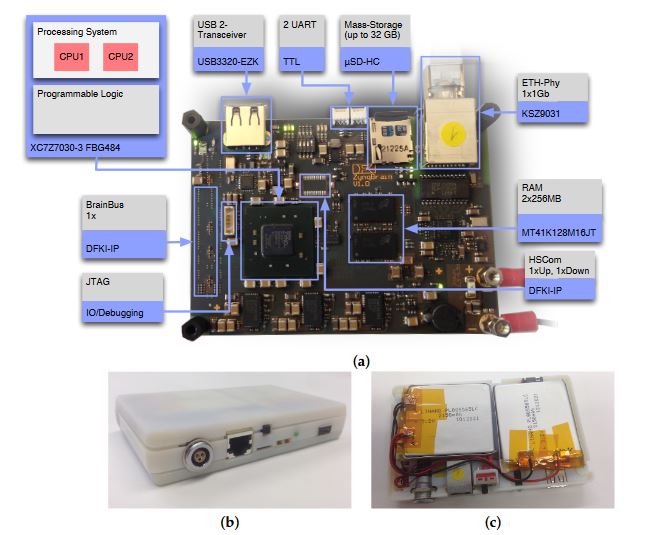
Figure 1. The ZynqBrain processing platform: (a) printed circuit board; (b) assembled system with 3D-printed cover; (c) battery pack
A schematic diagram of the ZynqBrain is shown in Figure 1a. The ZynqBrain is manufactured in Pico-ITX format (70 × 100 mm). The central component is a Xilinx Zynq® ZC7030FBG484-3. A ZC7030 consists of two parts: a Processing System (PS) (which is an ARM® Cortex-A9 dual core CPU running at 1 GHz) and a Programmable Logic (PL) section, which is equivalent to an FPGA. 512 MB DDR3 SD-RAM are connected to the PS.
APPLIED SIGNAL PROCESSING AND MACHINE LEARNING PROCEDURES
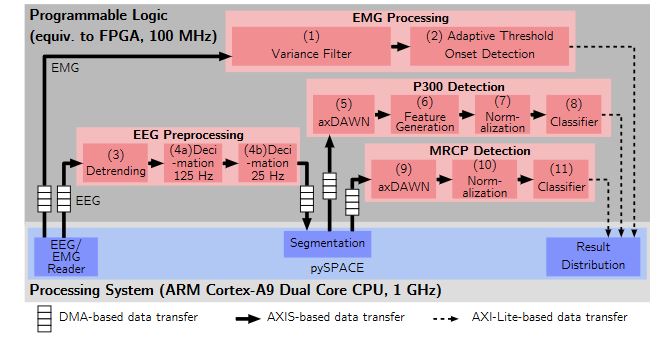
Figure 2. Hybrid parallel processing for electroencephalography (EEG) and electromyography (EMG) detection. The numbers shown in each processing step refer to the detailed description in Section 4
The second implementation is based on the DFHWA architecture discussed in Section 3.2. In this case, all arithmetic operations are implemented using fixed-point arithmetic. The applied operations are shown in Figure 2 and are, apart from the arithmetic type, equivalent for the software and hardware implementation.
EXPERIMENTAL EVALUATION
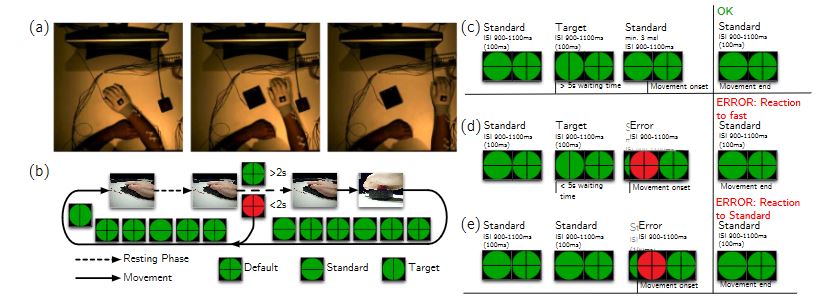
Figure 4. Illustration of the conducted experiments
Figure 4 shows the experimental setup and procedures. The subjects were seated in a chair in front of a table. A monitor, a button board and a buzzer were placed on the table (Figure 4a). The subjects were asked to perform 40 self-paced movements of their right arm according to an oddball paradigm. In the resting state, the hand of the subject was placed on the board.
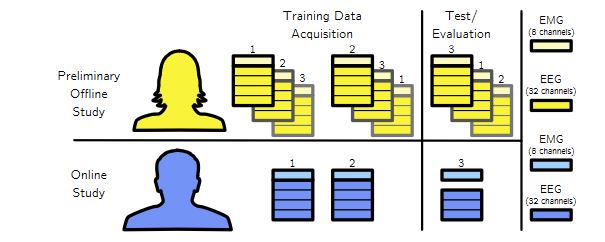
Figure 5. Illustration of the online evaluation/offline cross validation scheme
The study consisted of one recording session per subject, each recording session was divided into three runs as shown in Figure 5 (resulting in 120 movements per subject and session; 80 movements belong to the training and 40 movements to the test phase). 24 datasets from 8 subjects (3 runs × 8 subjects) were used in the offline evaluation, and 4 datasets from 4 subjects (1 runs × 4 subjects) for the online evaluation.
RESULTS AND DISCUSSION
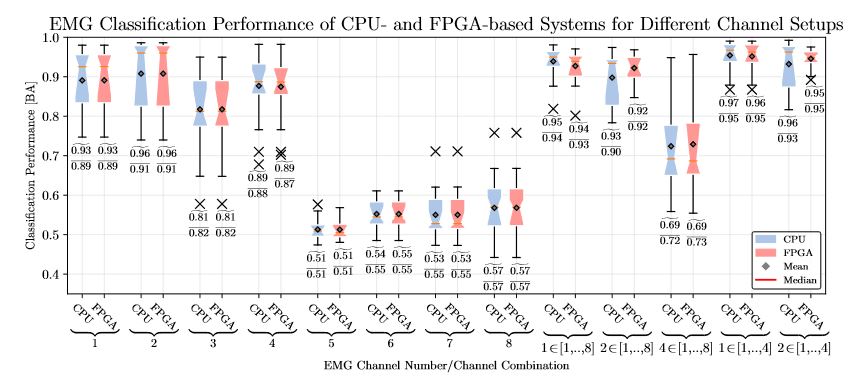
Figure 6. Classification performance for the prediction of movements based on the EMG
To this end, the classification performances of eight single-channels and five different channel combinations (see Figure 6) were analyzed by a two-way repeated measures ANOVA with the channel setup (CS, 13 levels as described above) and hardware architecture (HA, 2 levels: CPU-based system with double precision floating point vs. FPGA-based system with fixed-point arithmetic) as within-subjects factors.
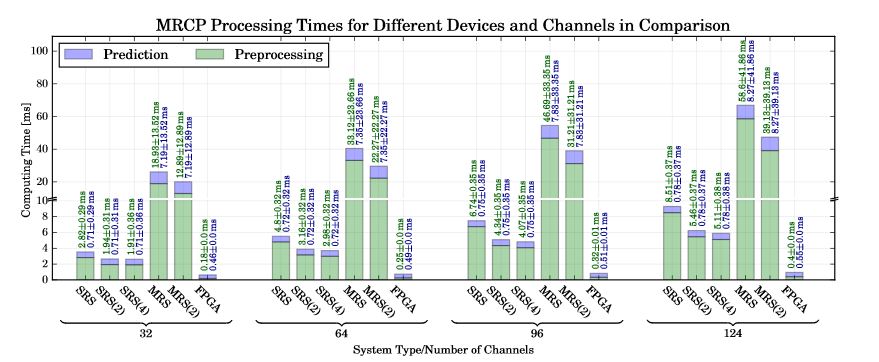
Figure 9. Computing times of different computing setups for 32–124 channels for the detection of the Movement Related Cortical Potential (MRCP)
The computing times for the different reference systems discussed in Section 5.5 are shown in Figure 9. Reported is the amount of time required to perform a single prediction, i.e., to process 200 ms of EEG data. Two values are reported for each setup: the time required for the preprocessing (which corresponds to the Preprocessing DFHWA shown in Section 4.2) as well as the time for the actual prediction (which corresponds to the MRCP Processing DFHWA).
CONCLUSIONS AND FUTURE DIRECTIONS
In this paper, we presented a novel mobile system based on reconfigurable hardware and dataflow computing for the online processing of multiple streams physiological data. The system provides the capability to predict movements based on an online analysis of multiple streams of data in parallel. This can be used to generate hybrid predictions by combining EEG and EMG-based movement predictions or movement predictions with task-related patterns, i.e., the P300.
We showed that the hybrid movement prediction can result in a significantly improved classification performance over single predictions. The developed system has been evaluated in a study that consists of 12 subjects in total. It is able to outperform standard CPU-systems regarding prediction time and provides a lower power consumption than a standard PC. Furthermore, we showed that the fixed-point arithmetic that was used in the FPGA-implementation does not result in a decrease of the classification performance.
The next steps are the integration of the proposed system into an exoskeleton for robotic rehabilitation scenarios and the combination of the control algorithms of the exoskeleton with the movement prediction in a single SoC design. Such a tight integration will allow a real-time adaptation of the control algorithms of the exoskeleton to provide the possibility of an assist-as-needed rehabilitation.
Source: University of Bremen
Authors: Hendrik Wöhrle | Marc Tabie | Su Kyoung Kim | Frank Kirchner | Elsa Andrea Kirchner