
ABSTRACT
This work presents a robotic application aimed at performing environmental monitoring in data centers. Due to the high energy density managed in data centers, environmental monitoring is crucial for controlling air temperature and humidity throughout the whole environment, in order to improve power efficiency, avoid hardware failures and maximize the life cycle of IT devices.
State of the art solutions for data center monitoring are nowadays based on environmental sensor networks, which continuously collect temperature and humidity data. These solutions are still expensive and do not scale well in large environments. This paper presents an alternative to environmental sensor networks that relies on autonomous mobile robots equipped with environmental sensors. The robots are controlled by a centralized cloud robotics platform that enables autonomous navigation and provides a remote client user interface for system management.
From the user point of view, our solution simulates an environmental sensor network. The system can easily be reconfigured in order to adapt to management requirements and changes in the layout of the data center. For this reason, it is called the virtual sensor network. This paper discusses the implementation choices with regards to the particular requirements of the application and presents and discusses data collected during a long-term experiment in a real scenario.
THE PROPOSED SOLUTION
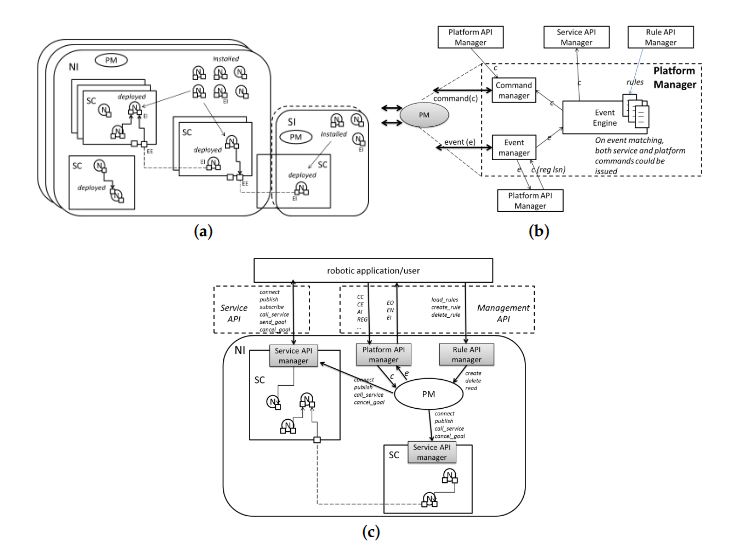
Figure 2. The cloud robotics platform developed by TIM. (a) The platform objects and their relationships; (b) the platform manager logic architecture
The cloud robotics platform guarantees robustness in long-term applications: it stores the state of every ROS node in the application and is able to restart nodes that crash. The platform is also devoted to distribute the computational load among remote locations, providing better computational performances than the robot’s onboard PC. The basic elements of the cloud platform are depicted in Figure 2a and listed below.
THE NAVIGATION LAYER
According to Section 2.2, the navigation layer groups all of the capabilities that allow a completely autonomous robot motion within the environment. The main capabilities are mapping, localization and path planning (Section 3.1). The navigation layer works as a middle-ware between the hardware layer (that is the robot itself) and the application layer. It receives goal targets and controls the robot to reach each goal autonomously and safely.
APPLICATION LAYER
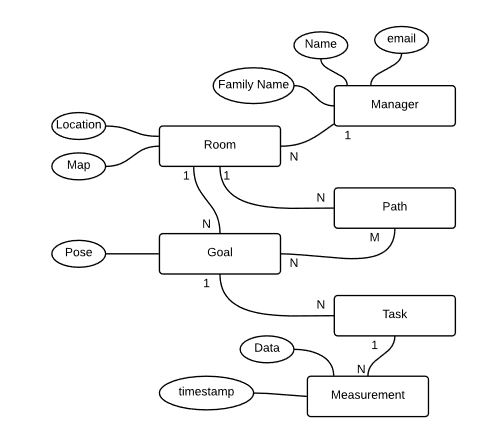
Figure 4. The database structure used in the proposed system. Rectangles represent tables, and ellipses represent data associated with each table
The data collected by the service are stored in a database structured as depicted in Figure 4. The database is composed of four main tables, namely room, goal, task and plan. The room table models a server room. It groups general information (e.g., room manager information) and application-specific information, which are the map, a list of goal entries and a list of plan entries. The goal table models a 2D pose with an associated a set of task entries.
EXPERIMENTS AND RESULTS
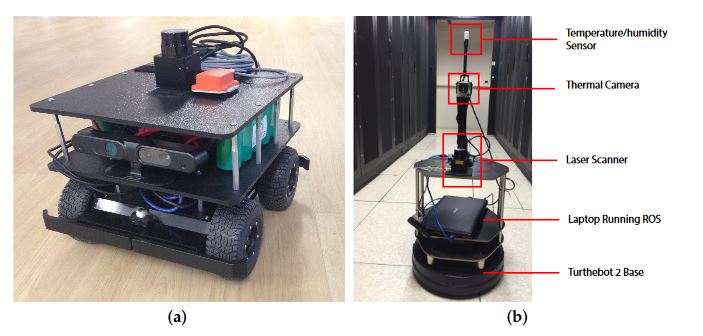
Figure 6. The two hardware platform prototypes. (a) The Coware Corob Classic 4 WD platform
To demonstrate the usefulness of the cloud robot platform in abstracting the hardware layer and to be compatible with different robot platforms, we first tested our system on hardware from two different vendors: a Coroware Corobot Classic 4WD rover endowed with a Hokuyo 04LX laser range finder, an XSens MTi Inertial Measurement Unit (IMU) (Figure 6a) and a Turtlebot 2 robot platform endowed with a Hokuyo 04LX laser range finder (Figure 6b). Please note that the Turtlebot 2 platform is internally equipped with an IMU sensor. Both platforms were equipped with a PC running Ubuntu Linux and ROS.
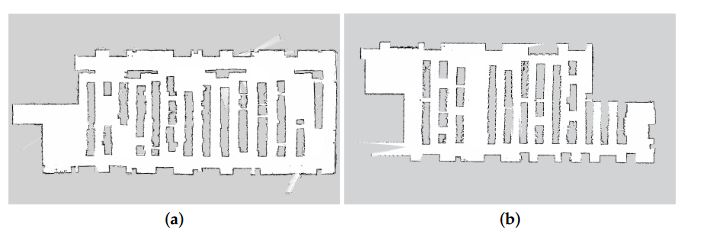
Figure 8. The two maps created with the mapping procedure
The mapping step was executed in all of the data center rooms where we used the robot. In Figure 8, we report the maps created in Room 1 and Room 2 of the Rozzano data center. Both maps were created in approximately 30 min by manually tele-operating the robot. The resolution of the map is 0.05 m/pixel.
CONCLUSIONS
In this paper, we presented a service robotics application for solving the problem of environmental monitoring of data centers. Our solution relies on a cloud robotics framework based on the Robot Operating System (ROS) and simulates an ESN. Instead of using several fixed sensors (nodes), a few sensors mounted on an autonomous mobile base are sufficient to reach each point of the environment and give localized measures.
We called this system a Virtual Sensor Network (VSN). We described the general architecture of the cloud robotics platform and how we applied this technology in a real service robotics application. Then, we described the application itself and our choices related to robot navigation and the monitoring application.
Finally, we showed the results from several experiments in order to validate the ability of the proposed solution to autonomously navigate within the environment (using two different robotic hardware platforms) and to test the application in real case scenarios. Data collection and thermographic analysis performed inside the data center room of Politecnico di Torino highlighted some issues regarding humidity control and isolation, which could be reported to the data center management for action.
Source: Iowa State University
Authors: Ludovico Orlando Russo | Stefano Rosa | Marcello Maggiora | Basilio Bona