
ABSTRACT
Urban search and rescue is needed for a variety of emergencies or disasters, including tornadoes, floods, dam failures, technological accidents, and terrorist activities. The efficiency to save people is becoming very important.
With the development of the technology, people are trying to find a better way to help people get out of the dangerous places as soon as possible. DIORAMA system has been proposed to help with this problem and turns out very successful on improving efficiency during emergency situation.
However, the current DIORAMA system is not perfect for all scenarios, for example, there are some outdoor environments do not support GPS service. Also, the RFID reader is very heavy for responders to carry and the indoor environment is not applicable for DIORAMA system. Besides, there are lack of forensic visualization toolkits that are able to help the incident commander analyze the responders’ behavior and efficiency.
In this project, we propose a Localization, Visualization and Evacuation Guidance System in Emergency Situations. The functionalities in this system include localization in outdoor environments using BLE. Besides, for outdoor environments, some forensic visualization toolkit that can help the responder analyze the responders’ behavior with the capability of visualization and representation of data clearly as well as replay the task, detect anomalies and visualize the anomalies clearly is also provided in improving the efficiency and organization in the future task.
In addition, the system also includes an indoor localization, navigation guidance and visualization system that provides guidance for people to exit a dangerous building as soon as possible. This system is able to localize the position of evacuees, and construct the exit path that helps reduce the escape time as well as provide a navigation guidance that is able to guide the user to the exit. In addition, an analyst simulation application is provided to simulate the evacuees in a building and evaluate the evacuation time for evacuees given specific path generation algorithm.

Animation and Interactive Tools.
LITERATURE SURVEY
In this section, we summaries some previous work regarding BLE implementation, localization, data visualization methods as well as some emergency navigation methods and simulation methods.
Nowadays, people are interested in the use of Bluetooth Low Energy (BLE). The feasibilities of the use of BLE technique have been well researched in many aspects. First of all, the feasibility study about the Bluetooth Low Energy (BLE) based wireless sensors has been investigated. And it turns out that the BLE based wireless sensor system has some advantages over other sensors such as low power consumption, good data throughput, which allows the BLE to be used in wireless network.
SYSTEM OVERVIEW
This project includes two parts, the Outdoor Localization and Visualization System, and the Indoor Localization, Navigation Guidance and Visualization System.
The Outdoor Localization and Visualization work for Diorama mainly includes the localization for responders and evacuees in outdoor environment, which provides localization of responder when GPS is not available and provides localization for evacuees when responders’ positions are provided by GPS to determine if evacuees have moved after triage, and also the forensic visualization part of the outdoor environment, which includes the Charts Representation of Data, Anomaly Detection Application and Google Earth Implementation of Data Visualization.

System Overview.
OUTDOOR LOCALIZATION AND VISUALIZATION SYSTEM
Objectives:
The Outdoor Localization and Visualization System aims to provide a localization and visualization result for responders, evacuees and incident commanders in emergency situation, the localization result can be used to localize responders when GPS is not available for responders or detect if the evacuees have moved after triage or not. The visualization function can be used to display the responders and the evacuees clearly.
Methods and Implementation Details:
Localization for Responders
For the scenario where GPS is not available, we need to localize the responders based on the BLE network. The BLE tags are deployed beforehand and the responder uses android smartphone, which has the capability to receive the RSSI of the BLE tags. The RSSI readings are used to estimate the approximate position of the responder.
Grid Based Sampling Algorithm.
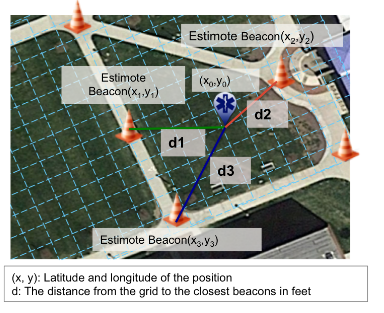
Localization of Beacons Based on Mobile Phone Localized by GPS:
In addition to localize responder based on stationary beacons, it would also be helpful to localize the evacuees based on the position of responders who are carrying mobile devices with them. The point of localizing the evacuees based on the responders’ positions is that after the responder triaged the evacuees, the evacuees may move, which is not aware by the responders or the incident commanders because the evacuees do not carry mobile device with them so that their position information will not be updated unless the responders update them. As a result, it would be very helpful if the position of the evacuees can be localized by the responders.

Evacuees Localization Architecture.
Outdoor Forensic Visualization Tools:
The post incident visualization system aims to reproduce the scenario that happened during the incident for the outdoor environments so that the responders are able to analyze their behavior and performance during the task to improve their efficiency in the future. The visualization system includes three parts, the charts part, anomaly detection part and the Google earth implementation part. We will discuss the details of these parts in the following sections.
Architecture
For Urban Search and Rescue Interactive Visualization application, since the information for this application is trivial and complicated, it is substantial necessary to classify them base on the classification. First of all, in this application I classify the object of the information, which is evacuees, responders, devices and weather condition, as the first layer. In addition, I separate the filter for these information as the second layer, the evacuee information can be summarized together as overview or be filtered by priority, and all the responders’ information can be put together as overview or distributed separately.

Architecture of Charts Interactive Visual Analytics Too.l
INDOOR LOCALIZATION, NAVIGATION GUIDANCE AND VISUALIZATION SYSTEM
Methods and Implementation Details:
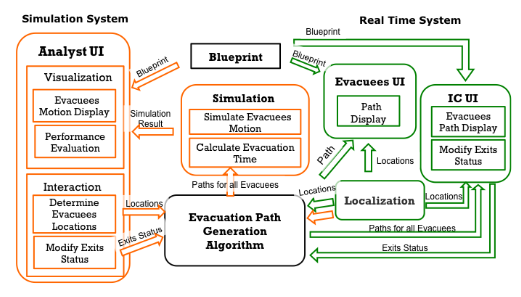
The Indoor Localization, Navigation Guidance and Visualization System include two major parts, the Real Time Navigation Guidance System and the Simulation System. In the entire system, the Blueprint part and the Evacuation Path Generation Algorithm is required by both Real Time Navigation System and the Simulation System. For the Real Time Navigation System, which is marked as green, the Evacuation Path Generation Algorithm takes the input from localization module and the interaction part of Incident Commander User Interface, and generates the path for all evacuees, which will be shown in both Incident Commander User Interface and the Evacuees User Interface.
Systems Architecture.
Real Time Navigation Guidance System
The Real Time Navigation Guidance System includes five modules, Localization Module that localize the location of the evacuees, Evacuation Path Generation Algorithm Module that generates the shortest path for all evacuees to exit, Incident Commander User Interface Module that provides visualization to Incident Commander and interact with the Evacuation Path Generation Algorithm Module, the Evacuees User Interface Module that provides visualization to Evacuees, and the Blueprint that provides visualization environment for visualization tools.

Real Time Navigation Guidance System.
Simulation System:
The Simulation System includes fourmodules as shown in black parts of figure, Analyst User Interface Module that is responsible for providing the evacuees locations and modify the exits status as well as display the visualization result of simulation, the Evacuation Path Generation Algorithm Module that generates the shortest path for all evacuees to exit, Simulation Module that parse the path to visualization and performance evaluation, and the Blueprint that provides visualization environment for visualization tools. In addition, the simulation system can also take the localization result from the real time navigation guidance system simulate the evacuees based on the real time evacuees’ locations.

Simulation System.
FUTURE WORK
The future work includes following items.
- Improve the localization algorithm.
The average localization accuracy of the current localization algorithm is about 20 feet
for outdoor environment, hopefully, with more tests and better localization algorithms, we can get a better localization result, which would improve the system.
- Improve navigation guidance system.
The current navigation guidance system works very well in Knowles Engineering based on the existing building tests. However, more tests should be done in more possible buildings to verify if the system works well in every case. Also, improvements might be necessary when the system is applied in different environments and different scenarios.
Besides, the current navigation guidance system only works for evacuees without any disabilities. However, in real scenario, people need wheelchair or vision impaired people might also need to use the application, in this case, we need to improve our system to make it applicable for those people.
Source: University of Massachusetts
Author: Jingyan Tang Ms
>> More Wireless Bluetooth Projects for Final Year Students
>> More Wireless Energy Projects for Final Year Students