
ABSTRACT
Wireless sensors can sense any event, such as accidents, as well as icy roads, and can forward the rescue/warning messages through intermediate vehicles for any necessary help. In this paper, we propose a smart vehicular ad hoc network (SVANET) architecture that uses wireless sensors to detect events and vehicles to transmit the safety and non-safety messages efficiently by using different service channels and one control channel with different priorities.
We have developed a data transmission protocol for the vehicles in the highway, in which data can be forwarded with the help of vehicles if they are connected with each other or data can be forwarded with the help of nearby wireless sensors. Our data transmission protocol is designed to increase the driving safety, to prevent accidents and to utilize channels efficiently by adjusting the control and service channel time intervals dynamically.
Besides, our protocol can transmit information to vehicles in advance, so that drivers can decide an alternate route in case of traffic congestion. For various data sharing, we design a method that can select a few leader nodes among vehicles running along a highway to broadcast data efficiently. Simulation results show that our protocol can outperform the existing standard in terms of the end to end packet delivery ratio and latency.
RELATED WORK
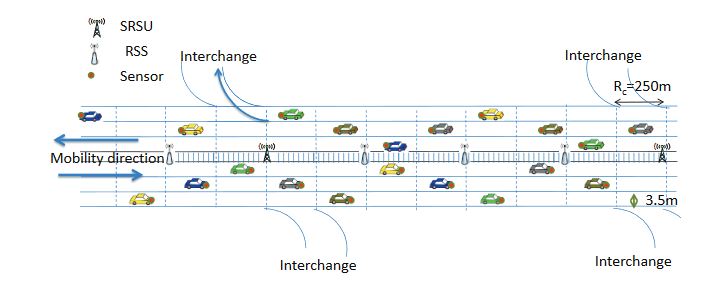
Figure 3. The proposed hybrid smart vehicular ad hoc network (SVANET) architecture
It is assumed that IEEE 802.11p and IEEE 802.15.4 coexist in each SRSU, and therefore, each RSS can transmit data to the SRSU using the IEEE 802.15.4 communication protocol. In order to make the architecture economically feasible, no cable or wireless connection is required in between any two SRSUs, as they can receive event information from vehicles, as well as from the RSSs to improve the data reliability. Any SOBU can communicate with other SOBUs using the IEEE 802.11p communication protocol. The proposed architecture for the highway scenario is shown in Figure 3.
DATA TRANSMISSION PROTOCOL IN SVANET
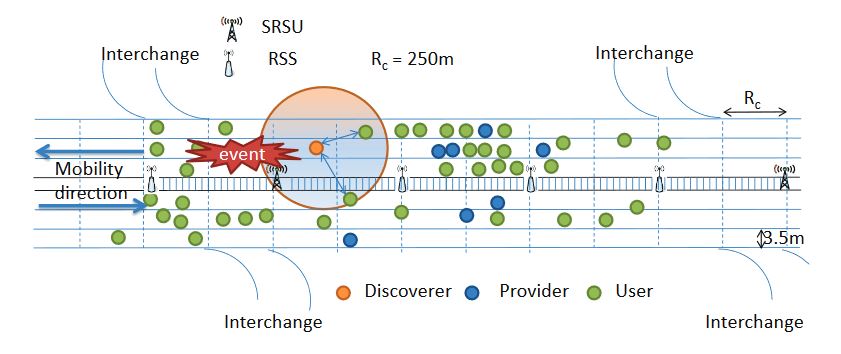
Figure 5. Example of event broadcasting phase
Discovers—vehicles detecting an event related to a warning message—need to send the message to the SRSU that is located at the previous interchange of the event location. For example, the SRSU will be the rightmost SRSU in Figure 5. This is because we want to warn the incoming vehicles, which have the choice to get off the highway through the interchange to avoid traffic congestion.
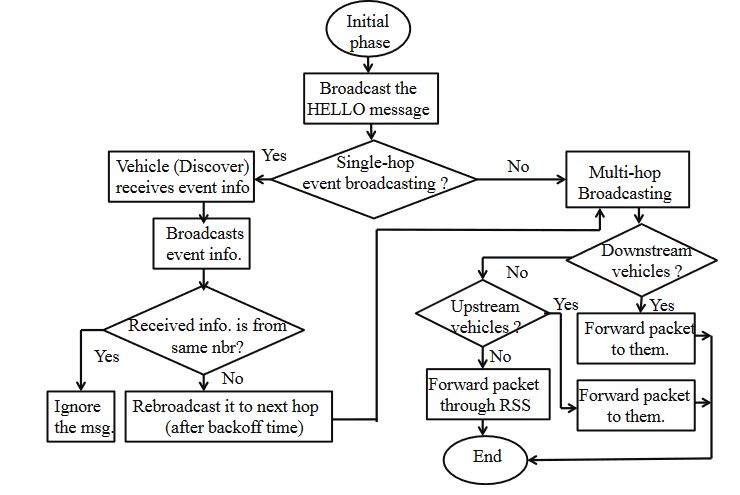
Figure 7. Flow chart for data transmission protocol in SVANET
The average waiting time for the vehicles moving along the opposite direction can be calculated by Equation (6). Finally, the message can be carried out by the vehicles moving along the opposite direction and is forwarded to the next SRSU through several hops. In addition to this method, we can use RSSs to forward the message in the gap area, and the message broadcast time can be calculated by Equation (2), the same equation used in Case A, by taking into account intermediate vehicles and RSSs as the required hops. The complete flow of our proposed data transmission protocol is shown through the state transition diagram, as given in Figure 7.
LEADER SELECTION IN SVANET
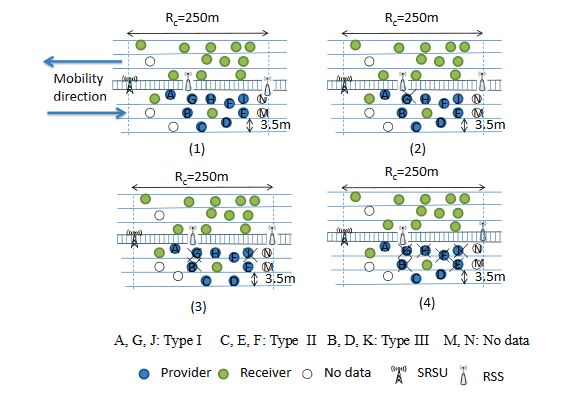
Figure 8. Selection of Leaders with different data types
However, Providers having different types of data to share with others will ignore that leader selection message. They continue to decrease their backoff timer and broadcast the leader selection message with their data type. The node that broadcasts the first leader selection message considers itself as the Leader after a certain predefined time interval. This procedure is continued until the leaders for those three types of data are selected. As shown in Figure 8(1), we consider that all vehicles are within the communication range and are moving along the same direction.
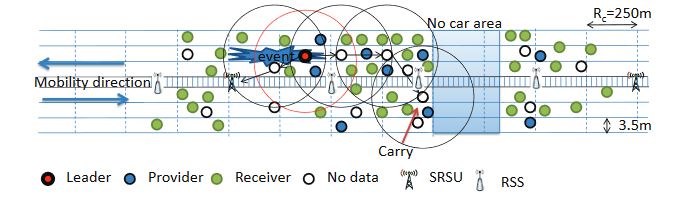
Figure 12. Selection of the next Leader when the network is partitioned
If no vehicle is within communication range of others and the network is partitioned, then the existing leader has to carry the data until it comes within the communication range of some other vehicle, as shown in Figure 12. However, the event information can be transmitted through the RSS to the SRSU, though the data cannot be transmitted. If the selected next leader is not meant for transmitting the event data, then the new leader is selected based on the requirement of the data.
PERFORMANCE EVALUATION
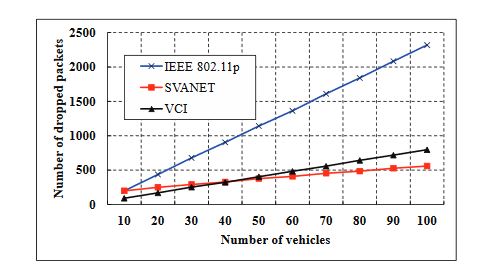
Figure 13. The number of packets dropped at the SRSU, when the CCH interval is between 50 ms and 100 ms
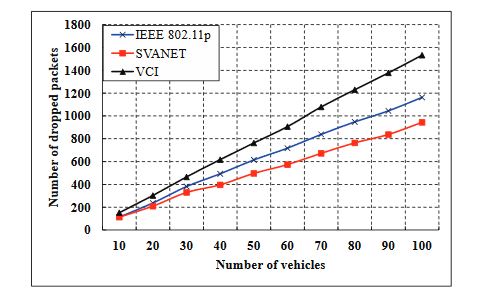
Figure 14. The number of packets dropped at the SRSU when the CCH interval is between 1 ms and 100 ms
The simulation results are shown in Figures 13 and 14, where the CCH interval is between 50 ms and 100 ms and between 1 ms and 100 ms, respectively. In Figure 13, we find that the number of dropped packets in the standard is greater than the VCI and SVANET. As the duration of the CCH interval in the standard is fixed, it cannot complete all of the packet transmissions. In this case, the number of dropped packets of the VCI is less than our protocol when the number of nodes is less than 40.
CONCLUSIONS
In this paper, a data transmission protocol for forwarding different types of data is proposed. A hybrid VANET architecture that is different from the existing research is proposed to form a smart vehicular ad hoc network with a limited number of sensors and road side sinks. Towards addressing the existing problem of data transmission and sharing, we propose the idea of integrating the VANET with inexpensive wireless sensors.
Sensor nodes are fitted in vehicles and road side sinks deployed along the roadside to sense any kind of road conditions and to buffer and deliver messages to other vehicles, regardless of the density or connectivity of the VANET. In this paper, we investigate these challenges and propose schemes for effective and efficient vehicle-to-sensor and sensor-to-sensor interactions. A multi-channel communication mechanism between the sensors and vehicles is proposed in our SVANET, in which both IEEE 802.15.4 and IEEE 802.11p MAC are used.
Besides, based on the IEEE 1609.4 standard, a dynamic channel adjustment protocol is designed, which can adjust the interval between CCH and SCH to transmit messages efficiently. In order to improve the data delivery ratio and data transmission reliability, a leader selection algorithm among vehicles is proposed, so that different types of data, such as video, audio and text, can be transmitted to passengers with other vehicles based on their interest. Based on our method, leaders can transmit the data to SRSUs and vehicles through SRSUs and RSSs.
Since, drivers can get the event information, such as icy road conditions, accident locations and traffic congestion in advance, they can find alternate routes to exit through nearby interchanges. We developed algorithms to adjust the CCH and SCH intervals dynamically and have compared the performance of our protocol with the IEEE 802.11p standard. The proposed SVANET can be economically feasible as there is a small number of road side units and sensors used to improve the average data delivery ratio irrespective of the number of vehicles in each lane on the road.
Source: Chang Gung University
Authors: Prasan Kumar Sahoo | Ming-Jer Chiang | Shih-Lin Wu