
ABSTRACT
Timing isolation is critical for automotive systems. Real-time virtualization, such as RT-Xen, is a promising technique to integrate legacy automotive systems onto a powerful multi-core platform for achieving better performance and lower cost without breaking the timing isolation. However, the real-time virtualization has never been evaluated with real automotive applications in a non-simulation environment. In order to facilitate the evaluation of real-time virtualization for automotive systems, we propose the AutoV, an affordable and accessible automotive testbed for real-time virtualization. We present a case study to demonstrate the applications of the AutoV.
INTRODUCTION
Automotive systems are becoming increasingly complex. Virtualization is a promising technique to achieve low size, weight, power and cost (SWaP-C) for automotive systems: functionalities on multiple ECUs can be consolidated into multiple virtual machines (VMs) on a commodity multicore processor. However, the temporal coupling among concurrently running applications in VMs on a multicore processor makes the certification of virtualized automotive systems particularly challenging.
The functional safety of automotive applications may be violated by the interference channels on multicore processors, such as CPU, cache, shared memory, and I/O devices. In order to leverage the benefits of virtualization in automotive domain, we must identify, analyze, and mitigate these sources of interference for virtualization systems.
AUTOV FRAMEWORK
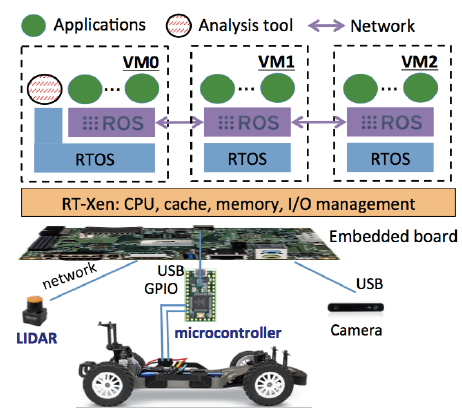
Fig. 1: Overview of AutoV architecture.
The AutoV integrates (1) an autonomous car to provide the automotive applications for evaluation. The car can autonomously drive in indoor hallways from point A to point B by following a pre-provided map; (2) a RT-Xen hypervisor to consolidate automotive functionalities into VMs; (3) a compositional analysis tool, e.g., CARTS tool, to analyze the resource requirement of VMs in a compositional way. Fig. 1 illustrates the architecture of the AutoV.
CASE STUDY
In the case study, the car follows the same map under four different scenarios: (i) baseline scenario when the autonomous applications run alone in non-virtualization environment; (ii) virtualization-baseline scenario when the autonomous applications run alone in VMs on Xen; (iii) virtualization-unsafe scenario when the interference applications and autonomous applications run in different VMs on Xen and interfere with each other; (iv) real-time virtualization scenario which is similar to the virtualization-unsafe scenario but replaces Xen with RT-Xen. We compare the real-time performance of the autonomous applications in these four different scenarios.
Source: University of Pennsylvania
Authors: Meng Xu | Insup Lee