
ABSTRACT
This paper reports on the design of an OPNET simulation platform to test the performance of sending real-time safety vi deo over VANET (Vehicular Adhoc NETwork) using the WiMAX technology. To provide a more realistic environment for streaming real-time video, a video model was created based on the study of video traffic traces captured from a realistic vehicular camera, and different design considerations were taken into account.
A practical controller over real-time streaming protocol is implemented to control data traffic congestion for future road safety development. Our driving video model was then integrated with the WiMAX OPNET model along with a mobility model based on real road maps. Using this simulation platform, different mobility cases have been studied and the performance evaluated in terms of end-to-end delay, jitter and visual experience.
RELATED WORKS
There have been practical implementations of VANET testbeds. For example, a testbed was implemented to extract H.263 video streams through an ADSL (Asymmetric Digital Subscriber Line) gateway to an SQL server in the Internet. A prototype testbed using a handheld device with an Android operating system was presented for data-intensive application.
While these approaches are effective, their hardware implementations are expensive and do not allow quick and easy changes to adapt to various industry scenarios and implementation of special safety applications. Video cameras make up a key component in VANET due to their ability to aid navigation safety and give road users and relevant authorities a precise and clear image of the traffic conditions when necessary.
OPERATION AND MODELS OF THE VANET TESTBED
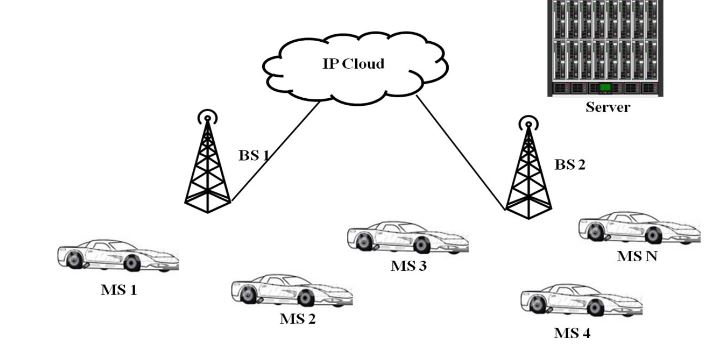
Figure 2. Vehicle camera network operation
Figure 2 is a simple example of a VANET consisting of cars communicating their video information with each other and with the Internet (IP cloud) via the RSUs, which can be implemented as a WiMAX-enabled Base Station. The server is to forward or to arch ive the streaming video from the cars. Each car is acting as a WiMAX Mobile Station (MS) capable of receiving, processing and forwarding data to the destination and consequently to the backhaul network via the WiMAX Base Station.
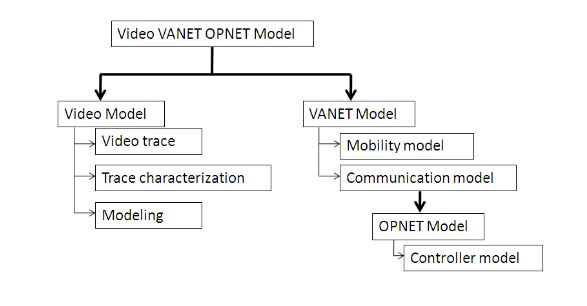
Figure 4. Driving video VANET OP NET Model structure
Figure 4 summarizes the various components of our Driving Video VANET OPNET model. It consists mainly of the video model and the VANET model. OPNET modeler then provides the platform for the communication model and allowed for the integration of the various components of the Driving Video VANET OPNET model and other considerations like the congestion controller. They are discussed in the following.
EXPERIMENTAL SETUP
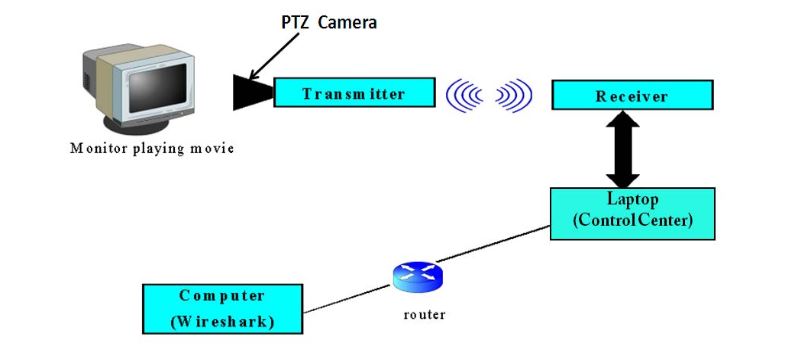
Figure 7. Setup for taking video traces
As shown in the setup of Figure 7, we use the monitor to play a series of driving video clips at 10 min each from driving action movies. Each video was captured by a PTS (Pan Tilt Zoom) camera taken from a vehicle. The video is encrypted and highly compressed at a ratio of 250:1 at the transmitter block. Using one processor for each section of the screen, the 96-array processors in the transmitter block can achieve fast independent image processing.
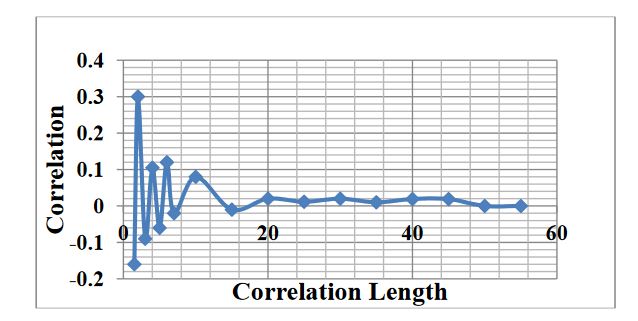
Figure 9. Correlation length of driving video
The next challenge is to analyze the trace and to create a driving video traffic model for traffic generation later. To verify the correlation of video frame and to obtain the modeling parameter, we obtain the frame-to-frame correlation of the video traffic. Figure 9 is an example using our video trace, which shows correlation is present up to 20 seconds apart.
PERFORMANCE EVALUATION USING OPNET TESTBED
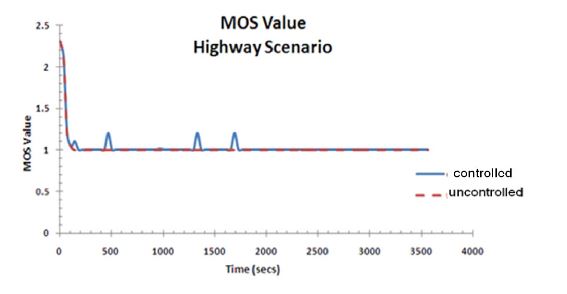
Figure 15. MOS value for a highway scenario
To customize this parameter for video evaluation, we have created a testbed case with all the “ideal” conditions. We allocate one base-station to one car so that there is more than sufficient bandwidth, hence keeping R as high as possible. We obtained a Visual MOS value of 3.6 that we should use as a reference to represent the best visual experience and 1 the worst visual experience, which is plot as the Y-axis in Figure 15.
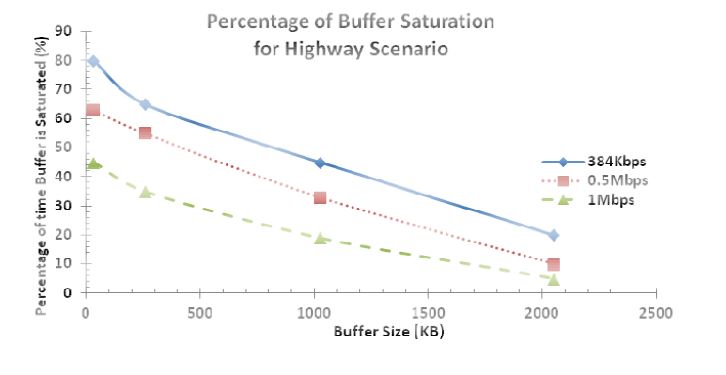
Figure 19. Percentage of buffer saturation performance for highway scenario
The percentage of buffer saturation of the highway scenario is shown in Figure 19. As expected, the percentage of time for which the buffer is full decreases with respect to increasing buffer size. Note also the larger bandwidth also reduces the percentage as packets can be served faster.
CONCLUSIONS
We have created and evaluated an effective driving video VANET simulation platform with which other researchers can develop and test various VANET applications. The platform was built using the OPNET simulation tool to integrate our theoretical driving video model with a VANET model. We have built a simple but practical traffic controller for driving video traffic over RTP applications, and provided a complete tier of communication layers for proper performance analysis. With the initial work done, there is still a lot of room for improvement and for exploring new model futures.
Concurrent simulation using the simulation model and the mobility model would allow the wireless communication to affect the mobility of vehicles more directly so that closer reality results can be obtained. The traffic controller can be improved to keep the end-to-end delay closer to constant in order to reduce the quality impact on the viewers. Others include the comparison of our traffic controller under DSRC, and the validity of the Rician/Raleigh propagation model for moving vehicles.
Source: University of Ottawa
Authors: Jun Steed Huang | Oliver Yang | Funmilyo Lawal