
ABSTRACT
We propose a novel type of neural networks for structural control, which comprises an adaptive input space. This feature is purposefully designed for sequential input selection during adaptive identification and control of nonlinear systems, which allows the input space to be organized dynamically, while the excitation is occurring. The neural network has the main advantages of (1) automating the input selection process for time series that are not known a priori; (2) adapting the representation to non stationarities; and (3) using limited observations.
The algorithm designed for the adaptive input space assumes local quasi-stationarity of the time series, and embeds local maps sequentially in a delay vector using the embedding theorem. The input space of the representation, which in our case is a wavelet neural network, is subsequently updated. We demonstrate that the neural net has the potential to significantly improve convergence of a black-box model in adaptive tracking of a nonlinear system. Its performance is further assessed in a full-scale simulation of an existing civil structure subjected to nonstationary excitations (wind and earthquakes), and shows the superiority of the proposed method.
CONTROLLER ARCHITECTURE
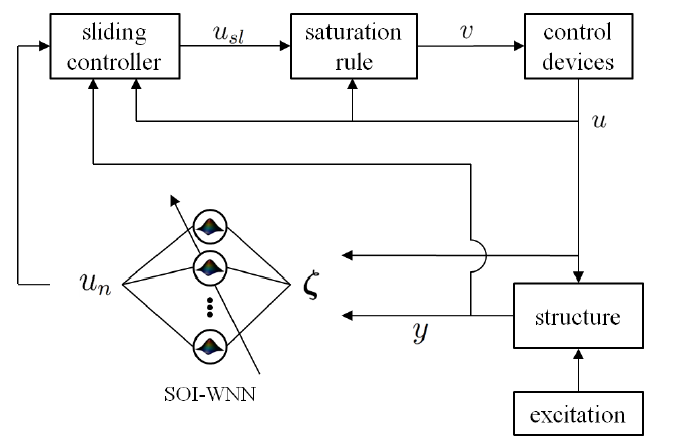
Figure 1: Block diagram of the closed-loop control system.
Figure 1 shows a representation of the controller for specific applications to semi-active structural control. The structure is subjected to an external forcing (excitation) and forces from the control devices. The dynamic states y and the control forces u are fed in the adaptive SOI-WNN under the input vector ζ to obtain the neuro control force un. A sliding controller modifies un to account for the large region of force un reachability arising from the semi-active device, and the resulting force usl is used to determine the voltage v in the control device, which governs the final control force u.
SELF-ORGANIZING FEATURE

Figure 3: Illustration of Takens embedding theorem.
Figure 3: Illustration of Takens embedding theorem. a) Phase-space of the unknown system to be reconstructed (here a 2-dimensional representation of a Du‑ffing system y = h(x1; x2; x3); b) time series measurements y are taken from a single state (y(x1) = x1 of the unknown system; and c) the unknown system phase-space can be diffeomorphically reconstructed, here in a 2-dimensional phase-space constructed from y with a time delay T.
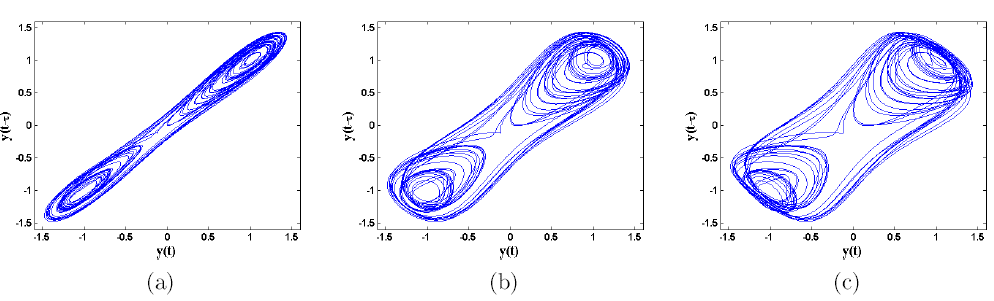
Figure 4: Unfolding the state-space in function of T . a) T = 0:5 sec; b) T = 1:4 sec; and c) T = 2 sec.
The objective of the MI test is to find an appropriate time delay T for representing the essential dynamics of a system. Take the 2-dimensional system from figure 3 for instance. If one tries to reconstruct the phase space using y(k) and y( kT ), a small value for T will collapse the phase-space to a 45 degree line. Qualitatively, T needs to be augmented to unfold the phase-space until enough information from the dynamics can be extracted. If T is too high, the phase-space would have unfolded too much, and information will be lost. Figure 4 illustrates the principle for the unknown system represented in figure 3.
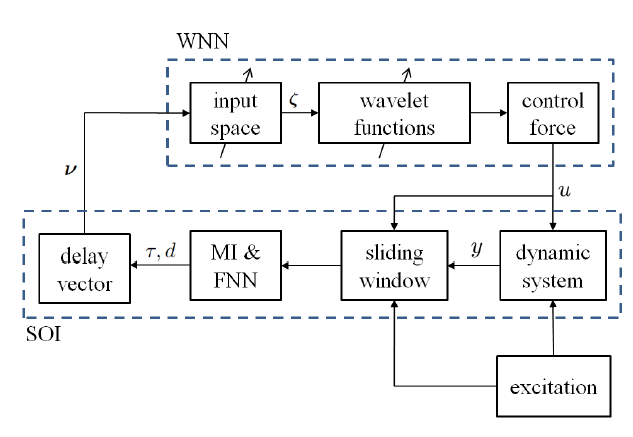
Figure 5: Block diagram of the proposed SOI-WNN.
Figure 5 summarizes the SOI algorithm integrated to the WNN, which is the proposed SOI-WNN. In the figure, the SOI algorithm selects values of T and d using the MI and FNN methods on the last n state and input observations from the sliding window. In the case where the excitation is not observable, the delay vector may be constructed by over embedding the state observation y. A delay vector is constructed and becomes the objective input space. The actual input space ζ of the WNN is adapted smoothly based on, and a new forcing u is computed.
SELF-ADAPTING FEATURE
The SOI-WNN parameters are continuously adapted toward optimality. Given the nonstationary excitation and the integration of semi-active devices in the closed-loop system, the adaptive control rule is not expected to converge. This section derives the parameter adaptation rules. For clarity, the derivation is specialized for a scalar force output (a single control device). The adaptation rules can be easily extended to several control devices using matrix notation. Nevertheless, it might be useful in applications to consider decentralized controllers, for which the scalar notation applies.
PARAMETERS SELECTION
Parameter selection is a fundamental task in designing neural networks. In structural control, it is not uncommon that non-adaptive parameters are tuned until performance satisfaction is attained. To remain consistent with the proposed application of the controller, one cannot rely on this parameter tuning opportunity. The aim of this section is to provide a discussion on the choice of parameters for the neural network, with the objective to give guidance in the controller design based on limited knowledge of a structure.
SYNTHETIC EXAMPLE
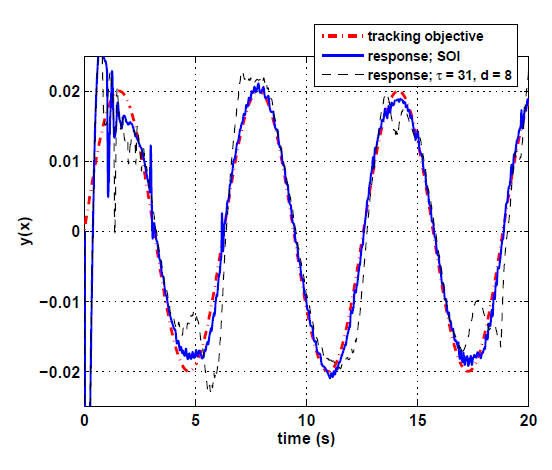
Figure 6: Time series responses. The SOI-WNN (blue straight line) converges more rapidly than the optimal fixed-input WNN (black dot-dash line).
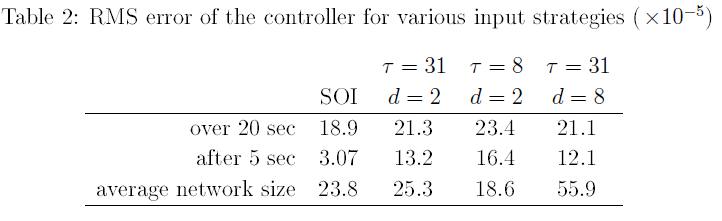
Figure 6 shows the time series response of the SOI algorithm versus the optimal fixed parameters. The SOI algorithm (blue straight line) results in a quicker convergence and better tracking results than the optimal fixed-input WNN (black dot-dash line). This is due to the dynamics of the control rule changing with time, for which adapting the input space results in a more efficient representation, as hypothesized. Table 2 shows the RMS error for the four input strategies over a tracking time of 20 sec, along with the average network size (number of hidden nodes).
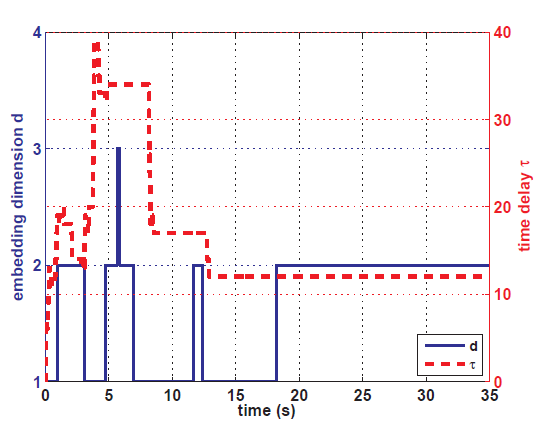
Figure 9: Identication of fixed T and d for a global representation.
In order to identify fixed (static) inputs for the representation, the SOI algorithm is switched off once the error metric stays below a threshold for a pre-defined number of steps. For this task, the capacity of the network to prune nodes has been relaxed, as we expect needing a denser network to construct an accurate representation of the global dynamics. Figure 9 shows the evolution of the input parameters over time, depicting the self-organizing nature of the input space.
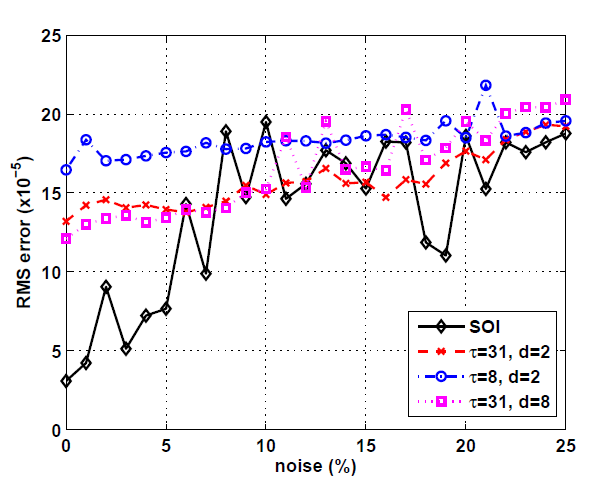
Figure 10: RMS error with respect to noise, after 5 sec (x10-5).
Here, various levels of Gaussian noise have been induced in the observations to study the performance under noise. Figure 10 shows the RMS error for noise ranging from 0% to 25%. The SOI-WNN is capable to significantly outperform any optimal fixed-input strategies for noise under 5%. However, above that level, the relative performance of the algorithm reduces quickly, with a tendency to perform similarly to the fixed-input strategies.
FULL-SCALE SIMULATION
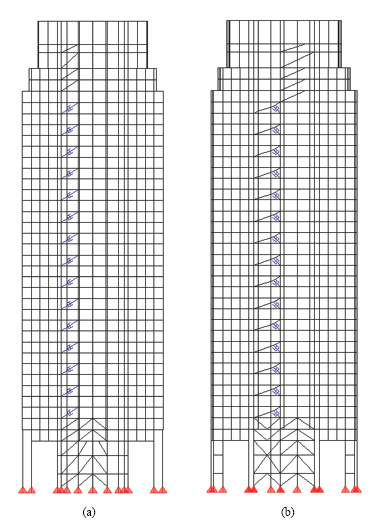
Figure 11: Elevation view of the simulated structure : a) X-direction; and b) Y-direction.
The simulated structure is a 39-story office tower located in downtown Boston, Massachussets. It was built in 1990 with a viscous damping system to mitigate excessive wind vibrations caused by a nearby tower. The design strategy and performance evaluation for the viscous damping system is documented. The tower comprises two viscous dampers in each direction (X-and Y-direction) every other floor, between floor 5 and 33, for a total of 60 viscous dampers. Figure 11 shows an elevation view of the structure in both directions along with the location of the dampers.

Figure 12: dynamics of the MFD under a 7.62 mm amplitude sinusoidal excitation of 0.5 Hz: a) force-displacement; and b) force-velocity.
In the simulations, the viscous dampers are replaced by variable friction dampers of similar capacity, termed Modified Frictions Devices (MFD). The semi-active device consists of a drum brake mechanism installed in parallel with a viscous and a stifiness element. The drum brake is equipped with a linear actuator, which force is substantially amplified by the brake self-energizing mechanism. The device can theoretically output a damping force range 0-1350 using a few linear actuators operating on batteries. The MFD was designed to mimic the dynamics of an MR damper. Figure 12 exhibits the idealized dynamics of a 200 kN MFD over various levels of voltage.
DISCUSSION & CONCLUSION
A novel neurocontroller has been presented for semi-active control of civil structures. The controller is an adaptive wavelet neural network, for which the novel feature is a self-adapting input space using the SOI algorithm. The SOI-WNN can sequentially update its input space based on limited and local measurements, while an excitation is occurring, which leads to a more effective representation due to the system nonstationarities.
The synthetic example from Section 6 demonstrated that the SOI algorithm was a powerful feature. For the example, the SOI algorithm resulted in being the best input option to achieve a quick rate of convergence compared against optimized fixed input strategies. This high performance was attained with a good level of stability and acceptable computation time with respect to the sliding window size, and the SOI-WNN was substantially better than any fixed-input strategies over the provided search space for noise levels between 0-5%. Based on the great performance on the low-dimensional synthetic example, the SOI-WNN has been simulated on a full-scale structure equipped with (nonlinear) semi-active control devices, subjected to wind and earthquake excitations.
Results from the wind excitation showed that the SOI-WNN was capable of achieving, at least, the same level of performance as the LQR controller, if not better. It also outperformed all of the fixed-input strategies optimized over the provided search space, using less power. Such high performance is similar to the synthetic example, and may be explained by the low-dimensional response of the structure when subjected to wind excitations, despite of their nonstationary nature.
Source: Iowa State University
Authors: Simon Laflamme | J. J.E. Slotine | J.J. Connor